![[体験レポ]2022国際ロボット展で京セラ株式会社のブースに行ってきました](https://devio2023-media.developers.io/wp-content/uploads/2022/03/18c7246c6790ab9621890de0fcff7606-scaled.jpg)
[体験レポ]2022国際ロボット展で京セラ株式会社のブースに行ってきました
この記事は公開されてから1年以上経過しています。情報が古い可能性がありますので、ご注意ください。
こんにちは、おんづか(@onzuka_muscle)です!
2022国際ロボット展に参加し、クラスメソッドのMAD事業部として支援させていただいている京セラ株式会社のブースでロボットによる自動化ソリューションを体験してきました!

レポート
体験
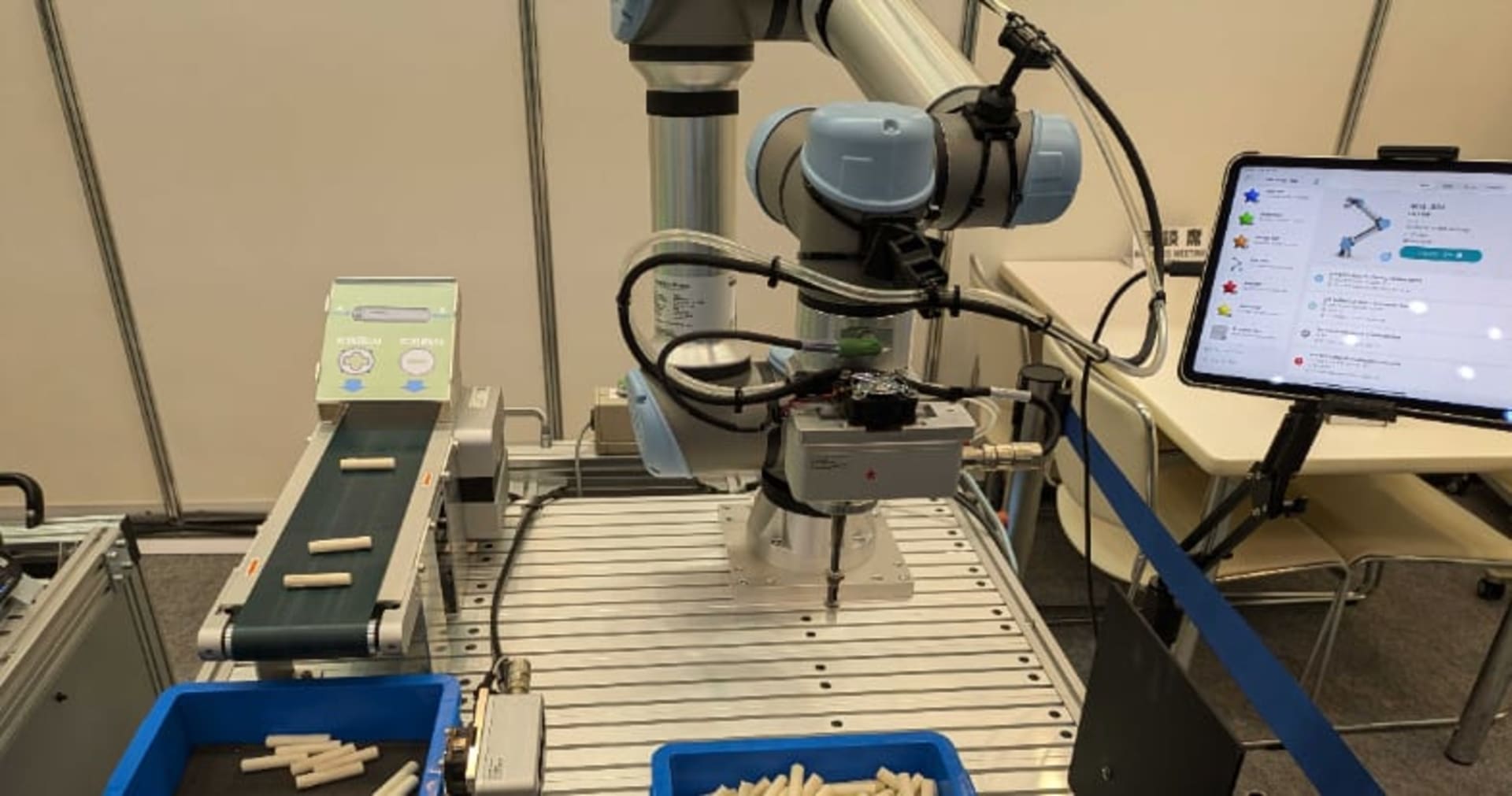
トレイに置いた様々な文房具の中から僕が選んだ対象をロボットアームが掴んで別のトレイに置くというシミュレーションを体験しました。
ロボットシステムはロボットに動きを教える「ティーチング」と呼ばれる作業を必要としています。これまでの仕組みの多くはこのティーチングに、プログラミングや動作の詳細な設定が必要でした。
そのため、ロボットを動かしたり、動きを変更するためにはそのロボットに関するスキルを身につけたエンジニア(熟練者)が必要となり、決まった用途で利用されるケースがほとんどでした。
このティーチングの仕組みをクラウドやAIを使って、エンジニアでなくてもできるように、人が人に指示するようにティーチングできるシステムを目指しているのが京セラのロボットシステムです。
早速体験してみます!
ロボットとのやりとりはiPadを通じて行います。

まず、ロボットが行う作業を設定します。今回はトレイ(領域)から別のトレイにモノを持ち運ぶ「Pick and Place」を選びます。
次に、どのトレイから、どのトレイに、何を持ち運ぶのかを設定します。
iPadで設定画面を開くと、ここで初めてロボットと連携が!

ロボットアームの上部についているカメラが作業環境のトレイを撮影します。

ロボットの作業環境がiPadに表示されました!
作業環境から対象を検出するために、ライブラリを選択します。今回は赤いペンを対象にしたいので、ペンの色まで識別できる「文房具(ペン識別)ライブラリ」を選択します。

作業対象の候補になる物体が検出されました!
ここから、iPadのGUIを使って、ドラッグアンドドロップで赤いペンを別のトレイに動かします。この操作で「3(緑)」のトレイから「1(黒)」のトレイに「ペン(赤)」を移動させる、ことをロボットに教えることができます。

(※こちらの画像では赤ではなく緑のペンを選択してますが、iPadの操作画面を後から提供していただいためです。)
操作を終えたら、作業内容をクラウドに保存し、ロボットにテストランの指示を出します。

いよいよロボットが動きます!
その様子は動画で撮影しましたのでこちらをご覧ください。
対象を判別してロボットアームが赤いペンを掴み、黒いトレイに置いてくれました!
ペンはそのままお土産に持ち帰りました。
京セラロボットシステムの特徴
体験をしつつこちらのロボットシステムについて特徴の説明を受けました!
前述の通り、人が人に指示するようにティーチングできるシステムを目指したシステムです。これを実現することで、誰でも作業の設定や切り替えができるようになり、ロボットの用途が大きく広がることが期待されています。
「赤いペン(対象)」を選んで「Pick and Place(作業目的)」を指定するだけでティーチング完了した!という手軽さをシミュレーションでまさに体験したということになります。
また、ロボットの動作や物体の識別も、今回は「Pick and Place」と「文房具」でしたが、標準で様々なライブラリ提供を予定しているとのことです。さらに、「文房具」の種類、例えば、「ペン」、「修正テープ」、「消しゴム」を見分けるだけでなく、今回のように「ペンの色」を識別する、といった、個別要件に合わせたチューニングも提供される予定です!
システム構造
エッジ・システム(ロボット)はクラウド・システムに接続しています。
カメラで撮影したデータをクラウドに収集し、クラウド上で分析・学習して活用することでライブラリの継続的な改善を実現しています。
詳細については京セラ株式会社のHPで紹介されています!
またこちらのクラウド・システム部分についてクラスメソッドが支援させていただいています!
感想
実際に自分の目で見て体験するというのは入ってくる情報量が多いです!とても臨場感があって楽しかったです。
ここ最近はコロナの影響でオンサイトでのイベントにずっと出ていませんでしたが、やっぱり良いものだなぁ思いました。
また自分が関わっているクラウド部分について目の前で動くロボットアームと繋がっていると考えると感動するものがありました。
安心して活用できるシステムにしていくため引き続き京セラ様とクラスメソッドメンバーで協力して頑張っていきたいと思います!
おまけ
いつもweb会議では顔を合わせている京セラメンバーと初めてリアルで対面しました。集合写真取りました✌️

僕が東京に行ったら必ず食べてるうどん「おにやんま」です。
冷やしぶっかけ+ちくわ天+とり天がおすすめです。