Unitree Go2 EDUに有線SSH接続して内蔵Jetsonの環境を確認してみた
こんにちは。atsuです。
Unitree Go2 EDUを使った巡回ロボットの開発を始めました。まずは開封してGo2にSSH接続し、どのような環境かを確認してみました。
はじめに
この記事では、Go2 EDUの開封からEthernet経由のSSH接続、そして内蔵Jetsonの環境確認までをまとめています。
前提条件
| 項目 | 値 |
|---|---|
| ロボット | Unitree Go2 EDU |
| 開発PC | M3 Mac Pro (macOS Tahoe) |
| 接続方式 | Ethernet 有線 (USB-C → RJ45 アダプタ) |
Go2 EDUには内蔵のJetson(NVIDIA製のエッジコンピュータ)が搭載されています。今回はこのJetsonにSSHで入って、開発環境として何が使えるかを確認するのがゴールです。
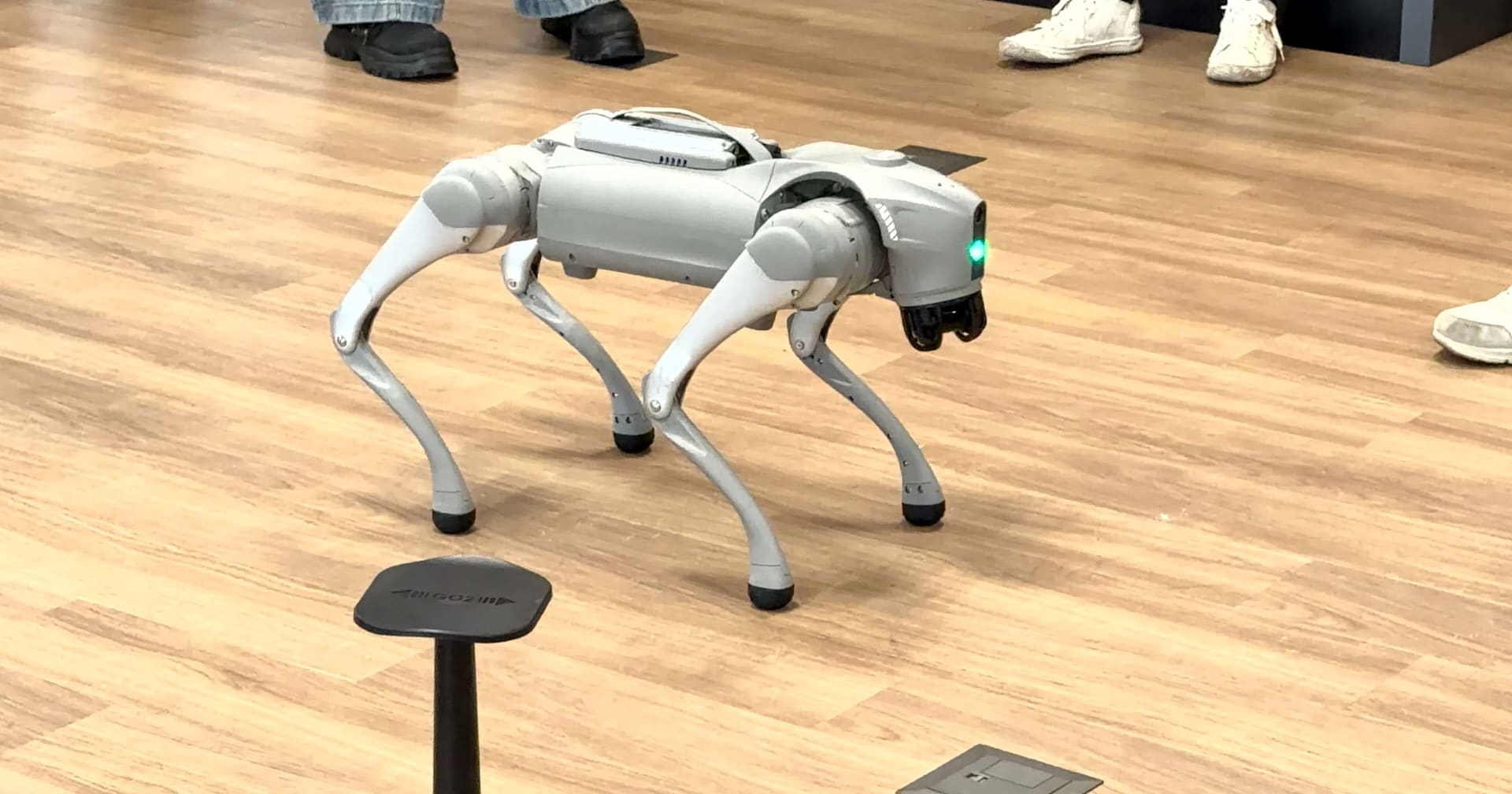
1. 開封と起動
起動方法は、電源ボタンを1回短く押して、2回目は長押しします。
LEDが4つ全部緑に点灯していればバッテリーは75-100%です。
起動時の注意点として、必ずお腹が床に接地した伏せた状態で起動してください。起動時に脚が動くので、周囲50cm以内には物を置かないほうが安全です。LiDARが回転し始めたら本体は起動完了しています。
2. アプリでペアリング
起動したら、まずスマホアプリで接続します。
Go2は自身がWi-Fiアクセスポイント(APモード)を発信しています。
- スマホのWi-Fi設定で
Unitree_Go2_XXXXを探して接続します - パスワードを入力します(個体によって異なる場合があります)
- 「インターネットなし」という警告が出ますが、無視して接続を維持します
- Unitree GOアプリを開いてペアリングします
「インターネットなし」の警告で接続が切れてしまうことがあるので、注意が必要です。
ここでアプリの基本操作も確認しておきました。
| 操作 | 方法 |
|---|---|
| 移動 | 左右スティック |
| 座り | Crouch Down ボタン |
| 立ち上がり | Stand Up ボタン |
| 緊急停止 | Stop ボタン(すぐ伏せる。安全) |
| 強制停止 | 電源5秒長押し(ドンと落ちる。緊急時のみ) |
アプリで動作確認できたら、SSH接続に進みます。
3. Ethernet直結でSSH接続
Go2へのSSH接続は、APモード経由ではなくEthernet直結で接続しました。
Mac (USB-C → RJ45アダプタ) ── LANケーブル ── Go2背面Ethernetポート
まず、Mac側のネットワーク設定でEthernetのIPを手動設定します。設定パスは「システム設定 > ネットワーク > Ethernet > 詳細 > TCP/IP > 手動」です。
- IP:
192.168.123.99(Go2と同じサブネットであれば末尾は任意です) - サブネットマスク:
255.255.255.0
Wi-FiとEthernetは同時に使えるので、インターネット接続を維持したままSSH接続できます。
ssh unitree@<Go2のIPアドレス>
パスワードを聞かれるので入力します。
Go2のデフォルトIPアドレスとSSHパスワードは、公式ドキュメントを参照してください。
接続できたら、ターミナルにJetsonのプロンプトが表示されます。
4. Jetson環境の確認
SSH接続できたので、中に何が入っているか確認してみました。
| 項目 | 状態 |
|---|---|
| RAM | 16GB(Orin NX) |
| ストレージ空き | 428GB(NVMe) |
| Docker | プリインストール済み |
| GPUランタイム | プリインストール済み |
| ROS2 | Foxy プリインストール |
| Nav2(ROS2の自律ナビゲーションフレームワーク) | Foxy 0.4.7 プリインストール |
環境確認に使ったコマンドは以下の通りです。
free -h
df -h
docker --version
dpkg -l | grep nav2
ただし、このプリインストール環境がどこまで使えるかは、まだ検証が必要です。
ROS2のバージョンがFoxyなのは現時点では少し古いです。
5. ROS2トピックの確認
以下のコマンドでROS2のトピックのリストが表示されます。
source /unitree/module/graph_pid_ws/install/setup.bash
ros2 topic list
巡回ロボット開発で使えそうなトピックを抜粋します。
| 用途 | トピック | メッセージ型 |
|---|---|---|
| LiDAR点群 | /utlidar/cloud |
PointCloud2 |
| オドメトリ | /utlidar/robot_odom |
Odometry |
| フロントカメラ | /frontvideostream |
Go2FrontVideoData(独自型) |
| バッテリー残量 | /lf/lowstate 内の bms_state.soc |
LowState(独自型) |
LiDARとオドメトリが標準的なROS2メッセージ型で出ているのはありがたいです。カメラとバッテリーは独自型なので、使う場合はUnitreeのメッセージ定義を読む必要があります。
まとめ
Go2 EDUの開封からSSH接続、Jetson環境の確認までやってみました。
SSH接続自体はEthernetケーブルを挿してIPを設定するだけなので、スムーズにできました。Jetsonの環境は充実しており、16GB RAM、Docker・ROS2プリインストール済みという状態は、開発しやすいものとなっております。