AWS IoT FleetWise で車載カメラ画像をクラウドに送ってみた
はじめに
製造ビジネステクノロジー部コネクティッドカーチームの新澤です。
AWS IoT FleetWise の
ビジョンシステムデータ対応
が発表されて2年が経ちましたが、自動車業界特化なサービスのためなのか、実際に試した日本語の情報はまだ多くありません。
この記事では「実際の車両からカメラ画像を送って、AWS 側で
S3 に保存する」ところまでを、なるべく具体的に分かる形で紹介したいと思います。
AWS 側とエッジ側が両方必要なので記事が少し長めですが、どうぞお付き合いください。
AWS IoT FleetWise のビジョンシステムデータ対応について
AWS IoT FleetWise は「車両から信号(スピード、ステアリング角度など)を設定した条件に従って収集し、
クラウドへ送る」ためのマネージドサービスです。
昨今では自動運転の開発や、ドライブレコーダーのデータ収集などの用途で、数値データだけでなくカメラ画像などの非構造化データをクラウドへアップロードする機会が
増えてきていますので、この対応により、カメラ画像などの非構造化データをクラウドへアップロードする際の実装が簡素化されます。
システム概要
全体アーキテクチャ
図にするとこんな感じです。
Raspberry Pi 内蔵の WiFi をアクセスポイントに設定して、そこにカメラデバイスを接続し、画像データを送信します。送信の仕組みには ROS2 を利用します。
IoT FleetWise のビジョンシステムデータ対応は FleetWise Edge Agent(FWE) が ROS2 を利用してデータを受信することを前提としているからです。
カメラデバイスは ROS2 のデバイス向け実装である micro-ROS を使ってデータを送信します。
FWE は ROS2 トピックをサブスクライブおり、直接 micro-ROS のデータを受信することはできないので、 micro-ROS Agent が micro-ROS と ROS2 のゲートウェイ役を担い、データが ROS2 トピックへ渡されます。
FWE は、収集条件に従って ROS2 トピックをサブスクライブし、受信したデータを収集ルールで定義された周期でクラウドへ送信します。
データフロー
上記の説明を図にすると、だいたいこのような感じです。
実装
全コードはリポジトリにアップしておきますので、要所に絞って解説します。
前提条件
- Raspberry Pi OS ( Bookworm )
- Raspberry Pi の内蔵 WiFi をアクセスポイントに設定済
- Raspberry Pi の有線 LAN ポート、もしくは USB WiFi ドングルでインターネットに接続できる経路が設定済
- Raspberry Pi に Docker の実行環境を設定済
1. AWS IoT FleetWise / IoT Core の CDK 実装
CDK 側では以下のようなリソースを実装します。
IoT Coreのリソースの役割は、通常の IoT Core を利用したシステムと同じです。
- S3: Vision System Data の保存先バケット
- IoT Core:
- Thing(車両と関連付けられる)
- 証明書(FleetWise Edge Agent からの相互 TLS に利用)
- IoT Policy(IoT Core 接続や S3 バケットへのファイル送信に必要な権限)
- Role Alias(Credentials Provider 用)
- IoT FleetWise:
- Signal Catalog: 車両から取りたい値(信号)と、その型や単位などのメタデータを定義してまとめたもの
- Model Manifest: Signal Catalog から使う信号を選び、車両から取得できる信号のセットを定義するもの
- Decoder Manifest: CAN/OBD/ROS 2 などの入力(バイナリやメッセージ)を、Model Manifest 上の信号にどう割り当てて解釈するかを定義するもの
- Vehicle: Model Manifest と Decoder Manifest を紐づけた「車両インスタンス」。実体としては IoT Thing と対応し、必要に応じて属性(例: 車種や車両番号など)を付与できます
- Campaign: いつ・どの信号を・どこへ送るかを定義する収集ルール。承認すると FleetWise からエッジへ配信され、S3/Timestream/MQTT などの宛先へデータが送られます
ROS 2 連携でのポイントは、「ROS 2 トピックを FleetWise の信号として解釈できるように Decoder を定義する」点です。
そのあたりに焦点を当てて解説していきます。
FleetWise リソースの実装
Signal Catalog
Signal Catalog は、FleetWise に定義する車両モデル全体から参照する「信号の辞書」です。
信号の定義は、以下のような内容でJSONで定義しています。(画像ファイル部分を抜粋)
まず、メッセージの構造体を定義していきます。基本的には、 ROS2 のメッセージ定義の構造体を "Types.<ROS2 メッセージ名 >" のように再定義していくようなイメージです。ちょっと面倒くさいですが、再定義していくだけなので、コーディングエージェントにまかせてしまえばあっという間に書けるでしょう。たぶん。。。
[
{
"struct": {
"fullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage"
}
},
{
"struct": {
"fullyQualifiedName": "Types.std_msgs_Header"
}
},
{
"struct": {
"fullyQualifiedName": "Types.builtin_interfaces_Time"
}
},
{
"property": {
"fullyQualifiedName": "Types.builtin_interfaces_Time.sec",
"dataType": "INT32",
"dataEncoding": "TYPED"
}
},
{
"property": {
"fullyQualifiedName": "Types.builtin_interfaces_Time.nanosec",
"dataType": "UINT32",
"dataEncoding": "TYPED"
}
},
{
"property": {
"fullyQualifiedName": "Types.std_msgs_Header.stamp",
"dataType": "STRUCT",
"structFullyQualifiedName": "Types.builtin_interfaces_Time"
}
},
{
"property": {
"fullyQualifiedName": "Types.std_msgs_Header.frame_id",
"dataType": "STRING",
"dataEncoding": "TYPED"
}
},
{
"property": {
"fullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage.header",
"dataType": "STRUCT",
"structFullyQualifiedName": "Types.std_msgs_Header"
}
},
{
"property": {
"fullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage.format",
"dataType": "STRING",
"dataEncoding": "TYPED"
}
},
{
"property": {
"fullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage.data",
"dataType": "UINT8_ARRAY",
"dataEncoding": "BINARY"
}
},
{
"branch": {
"fullyQualifiedName": "Vehicle.Cameras.Front",
"description": "Vehicle.Cameras.Front"
}
},
{
"sensor": {
"fullyQualifiedName": "Vehicle.Cameras.Front.Image",
"dataType": "STRUCT",
"structFullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage"
}
}
]
その後にセンサーノードとして Vehicle.Cameras.Front.Image を定義しました。
車両の前方カメラで撮影した画像、という感じですね。
{
"branch": {
"fullyQualifiedName": "Vehicle",
"description": "Vehicle"
}
},
{
"branch": {
"fullyQualifiedName": "Vehicle.Cameras",
"description": "Vehicle.Cameras"
}
},
{
"branch": {
"fullyQualifiedName": "Vehicle.Cameras.Front",
"description": "Vehicle.Cameras.Front"
}
},
{
"sensor": {
"fullyQualifiedName": "Vehicle.Cameras.Front.Image",
"dataType": "STRUCT",
"structFullyQualifiedName": "Types.sensor_msgs_msg_CompressedImage"
}
}
CDK の実装は、現時点では実装はちょっと面倒です。というのも、2025 年 12 月時点では CloudFormation の FleetWise のリソースが ROS2 未対応なため、AWS Custom Resource で API を呼び出して定義していく形になります。
const nodes = JSON.parse(fs.readFileSync('lib/ros2-nodes.json', 'utf8'));
const signalCatalogCr = new cr.AwsCustomResource(this, 'SignalCatalogCr', {
onCreate: {
service: 'iotfleetwise',
action: 'CreateSignalCatalog',
parameters: { name: 'DefaultSignalCatalog', nodes },
physicalResourceId: cr.PhysicalResourceId.of('ros2-signal-catalog'),
},
onDelete: {
service: 'iotfleetwise',
action: 'DeleteSignalCatalog',
parameters: { name: 'DefaultSignalCatalog' },
physicalResourceId: cr.PhysicalResourceId.of('ros2-signal-catalog'),
},
policy: cr.AwsCustomResourcePolicy.fromSdkCalls({
resources: cr.AwsCustomResourcePolicy.ANY_RESOURCE,
}),
installLatestAwsSdk: true,
});
Model Manifest
Model Manifest は「車両で収集可能な信号のセット」を定義するリソースです。
今回は、画像・速度・温度・加速度の 4 つの信号を車両モデルの信号として定義してみました。
const modelManifest = new iotfleetwise.CfnModelManifest(this, 'ModelManifest', {
name: 'Ros2ModelManifest',
description: 'Model Manifest for ROS2',
signalCatalogArn: signalCatalogArn,
status: 'ACTIVE',
nodes: [
'Vehicle.Cameras.Front.Image',
'Vehicle.Speed',
"Vehicle.Temperature",
'Vehicle.Acceleration',
],
});
ネットワークインターフェース
車両が利用可能なネットワークインターフェースを定義します。
通常は CAN インターフェースを定義することが多いですが、今回は以下のようにして ROS2 インターフェースを定義します。
[
{
"interfaceId": "10",
"type": "VEHICLE_MIDDLEWARE",
"vehicleMiddleware": {
"name": "ros2",
"protocolName": "ROS_2"
}
}
]
デコーダー
Vehicle.Cameras.Front.Image という信号に対して、ROS 2 のトピック
/ego_vehicle/rgb_front/image_compressed を紐づけています。
トピック名は任意です。
sensor_msgs/msg/CompressedImage は、 ROS2 で標準で定義されている圧縮画像のメッセージタイプです。
messageSignal.topicName に <TopicName>:<MessageType> 形式で定義します。
{
"fullyQualifiedName": "Vehicle.Cameras.Front.Image",
"type": "MESSAGE_SIGNAL",
"interfaceId": "10",
"messageSignal": {
"topicName": "/ego_vehicle/rgb_front/image_compressed:sensor_msgs/msg/CompressedImage",
"structuredMessage": {
"structuredMessageDefinition": [
{
"fieldName": "header",
"dataType": {
"structuredMessageDefinition": [
{
"fieldName": "stamp",
"dataType": {
"structuredMessageDefinition": [
{
"fieldName": "sec",
"dataType": {
"primitiveMessageDefinition": {
"ros2PrimitiveMessageDefinition": { "primitiveType": "INT32" }
}
}
},
{
"fieldName": "nanosec",
"dataType": {
"primitiveMessageDefinition": {
"ros2PrimitiveMessageDefinition": { "primitiveType": "UINT32" }
}
}
}
]
}
},
{
"fieldName": "frame_id",
"dataType": {
"primitiveMessageDefinition": {
"ros2PrimitiveMessageDefinition": { "primitiveType": "STRING" }
}
}
}
]
}
},
{
"fieldName": "format",
"dataType": {
"primitiveMessageDefinition": {
"ros2PrimitiveMessageDefinition": { "primitiveType": "STRING" }
}
}
},
{
"fieldName": "data",
"dataType": {
"structuredMessageListDefinition": {
"name": "listType",
"memberType": {
"primitiveMessageDefinition": {
"ros2PrimitiveMessageDefinition": { "primitiveType": "UINT8" }
}
},
"capacity": 0,
"listType": "DYNAMIC_UNBOUNDED_CAPACITY"
}
}
}
]
}
}
}
Decoder Manifest も Signal Catalog 同様に AWS Custom Resource で定義します。
const networkInterfaces = JSON.parse(
fs.readFileSync('lib/network-interfaces.json', 'utf8'),
);
const decoders = JSON.parse(fs.readFileSync('lib/ros2-decoders.json', 'utf8'));
const decoderManifestParams = {
modelManifestArn: modelManifest.attrArn,
name: 'Ros2DecoderManifest',
description: 'Decoder Manifest for ROS2',
networkInterfaces,
signalDecoders: decoders,
status: 'ACTIVE',
};
const decoderManifestCr = new cr.AwsCustomResource(this, 'DecoderManifestCr', {
onCreate: {
service: 'iotfleetwise',
action: 'CreateDecoderManifest',
parameters: decoderManifestParams,
physicalResourceId: cr.PhysicalResourceId.of('ros2-decoder-manifest'),
},
// ... onDelete は省略 ...
policy: cr.AwsCustomResourcePolicy.fromStatements([
new iam.PolicyStatement({
actions: ['iotfleetwise:CreateDecoderManifest', 'iotfleetwise:DeleteDecoderManifest'],
resources: ['*'],
}),
]),
installLatestAwsSdk: true,
});
decoderManifestCr.node.addDependency(modelManifest);
const decoderManifestArn = decoderManifestCr.getResponseField('arn');
Vehicle
Vehicle は、IoT Thing 名(thingName)と紐づく「車両インスタンス」です。
ここで上記で定義した Model Manifest / Decoder Manifest を Vehicle に紐づけます。
associationBehavior は IoT Thing を新規作成するか、既存 Thing と紐づけるかの選択を指定します。
Vehicle を定義する場合は、別途 Thing を定義して、それらと紐づけるように実装しましょう。
自動で新規作成してしまうと、あとで証明書を取り出せなくなってしまい、詰んでしまうので気をつけてください。
( Thing の実装については、リポジトリを参考にしてください。)
const vehicle = new iotfleetwise.CfnVehicle(this, 'Vehicle', {
name: thingName,
modelManifestArn: modelManifest.attrArn,
decoderManifestArn: decoderManifestArn,
associationBehavior: 'ValidateIotThingExists',
});
vehicle.node.addDependency(modelManifest);
Campaign
Campaign は車両データの収集ルール(「いつ」「何を」「どこへ」)を定義します。
この例では 10 秒周期で 3 信号を集め、S3 を宛先にしています。
ちなみに、 Campaign に1つでも ROS2 のデータが含まれていると、送信先は S3 しか選べないので注意してください。
const campaign = new iotfleetwise.CfnCampaign(this, 'Campaign', {
name: 'Ros2Campaign',
description: 'Campaign for ROS2',
action: 'APPROVE',
signalCatalogArn: signalCatalogArn,
targetArn: vehicle.attrArn,
collectionScheme: { timeBasedCollectionScheme: { periodMs: 10000 } },
compression: 'SNAPPY',
dataDestinationConfigs: [{ s3Config: { bucketArn: bucket.bucketArn } }],
signalsToCollect: [
{ name: 'Vehicle.Cameras.Front.Image' },
{ name: 'Vehicle.Speed' },
{ name: 'Vehicle.Acceleration' },
],
});
CDK のデプロイ
リポジトリから clone した後、CDK のディレクトリ(iotfleetwise-ros2/cloud/)で
pnpm を使ってデプロイします。
デプロイ実行時に AWS 認証情報が必要なので、aws cliの設定は済ませておいてください。
pnpm install
pnpm run cdk deploy
AWS リソースをデプロイできたら、次はエッジ側の実装です。
AWS IoT FleetWise Edge Agent(FWE)の設定
FWE, micro-ROS Agent
以下の docker-compose ファイルで FWE と micro-ROS Agent のコンテナを起動できるようにします。
services:
microros-agent:
image: microros/micro-ros-agent:humble
container_name: microros-agent
network_mode: host
ipc: host
command: ["udp4", "--port", "8888"]
volumes:
- /dev:/dev
- /dev/shm:/dev/shm
environment:
- ROS_DISTRO=humble
- ROS_DOMAIN_ID=0
- RMW_IMPLEMENTATION=rmw_fastrtps_cpp
- FASTDDS_BUILTIN_TRANSPORTS=UDPv4
healthcheck:
test: ["CMD", "pgrep", "-f", "micro_ros_agent"]
interval: 30s
timeout: 10s
retries: 3
start_period: 10s
restart: unless-stopped
fwe-edge-agent:
image: public.ecr.aws/aws-iot-fleetwise-edge/aws-iot-fleetwise-edge-ros2:latest
container_name: fwe-edge-agent
network_mode: host
ipc: host
volumes:
- /dev:/dev
- /dev/shm:/dev/shm
- ./cert/certificate.pem:/etc/aws-iot-fleetwise/certificate.pem:ro
- ./cert/private.key:/etc/aws-iot-fleetwise/private-key.key:ro
environment:
- VEHICLE_NAME=${VEHICLE_NAME}
- ENDPOINT_URL=${ENDPOINT_URL}
- CREDS_ENDPOINT_URL=${CREDS_ENDPOINT_URL}
- CREDS_ROLE_ALIAS=${CREDS_ROLE_ALIAS}
# ROS2 interface
- ENABLE_ROS2_INTERFACE=true
- ROS_VERSION=2
- ROS_DISTRO=humble
- ROS_DOMAIN_ID=0
- ROS_PYTHON_VERSION=3
- RMW_IMPLEMENTATION=rmw_fastrtps_cpp
# - FASTDDS_BUILTIN_TRANSPORTS=SHM
- COLCON_PREFIX_PATH=/opt/ros/humble
- COLCON_PYTHON_EXECUTABLE=/usr/bin/python3
# /usr/bin/start-fwe.sh が /opt/ros/humble/local_setup.bash を読む際に
# set -u 相当で未定義変数があると落ちるので、空でも良いので定義しておく
- AMENT_PREFIX_PATH=
- CMAKE_PREFIX_PATH=
- LD_LIBRARY_PATH=
- PKG_CONFIG_PATH=
- PYTHONPATH=
- AMENT_TRACE_SETUP_FILES=
- COLCON_TRACE=
depends_on:
- microros-agent
restart: unless-stopped
必要な環境変数は以下の4つ。
VEHICLE_NAME: FleetWise Vehicle 名 ( IoT Thing 名と同一 )ENDPOINT_URL: AWS IoT Core データプレーンエンドポイントCREDS_ENDPOINT_URL: AWS IoT Core 認証情報プロバイダーエンドポイントCREDS_ROLE_ALIAS: Role Alias 名
リポジトリのCDKでデプロイした場合は、以下で.envファイルを生成できます。
docker-compose.yaml と同じディレクトリに作成します。
REGION=us-east-1 bash -lc 'set -euo pipefail
VEHICLE_NAME="$(aws cloudformation list-exports --region "$REGION" --query "Exports[?Name==\`FleetWiseVehicleName\`].Value|[0]" --output text)"
CREDS_ROLE_ALIAS="$(aws cloudformation list-exports --region "$REGION" --query "Exports[?Name==\`CredentialsProviderRoleAlias\`].Value|[0]" --output text)"
ENDPOINT_URL="$(aws iot describe-endpoint --region "$REGION" --endpoint-type iot:Data-ATS --query endpointAddress --output text)"
CREDS_ENDPOINT_URL="$(aws iot describe-endpoint --region "$REGION" --endpoint-type iot:CredentialProvider --query endpointAddress --output text)"
cat > .env <<EOF
# FleetWise Edge Agent
VEHICLE_NAME=${VEHICLE_NAME}
ENDPOINT_URL=${ENDPOINT_URL}
CREDS_ENDPOINT_URL=${CREDS_ENDPOINT_URL}
CREDS_ROLE_ALIAS=${CREDS_ROLE_ALIAS}
EOF
echo "wrote .env"'
証明書・秘密鍵ファイル
FWE が使用するデバイス証明書と秘密鍵のファイルを作成します。
CDK で作成した証明書 / 秘密鍵は AWS Secrets Manager に格納しているので、取得して docker-compose.yaml ファイルからみて ./cert/ ディレクトリにファイルを配置しておきましょう。
証明書。秘密鍵ファイルは以下のようにして取得できます。
REGION=us-east-1
SECRET_ID="$(aws cloudformation list-exports --region "${REGION}" --query "Exports[?Name==\`IotCoreCertificateSecret\`].Value|[0]" --output text)"
mkdir -p cert
aws secretsmanager get-secret-value \
--region "${REGION}" \
--secret-id "${SECRET_ID}" \
--query SecretString \
--output text > cert/secret.json
perl -0777 -ne '
if (/"privateKey":"(.*?)"/s) {
$key = $1;
$key =~ s/\\n/\n/g;
open(my $fh, ">", "cert/private.key");
print $fh $key;
close($fh);
}
if (/"certificate":"(.*?)"/s) {
$cert = $1;
$cert =~ s/\\n/\n/g;
open(my $fh, ">", "cert/certificate.pem");
print $fh $cert;
close($fh);
}
' cert/secret.json
chmod 600 cert/certificate.pem cert/private.key
rm -f cert/secret.json
ファイルの転送
scp コマンドで Raspberry Pi に作成したファイルを転送します。
ssh pi@<RPI_IP_ADDRESS> "mkdir -p ~/fwe"
scp -r docker-compose.yaml .env cert/* pi@<RPI_IP_ADDRESS>:~/fwe/
FWE + micro-ROS Agent を起動する
RPi で以下を実行して、 FWE と micro-ROS を起動します。
docker compose up -d
車載カメラ(UnitCamS3)の実装
Unit CamS3 は M5 Stack 社から発売された ESP32S3 モジュールをベースとしたコンパクトなカメラユニットです。 2MP カメラ (OV2640) を搭載していて、最大 1600x1200 で撮影可能です。 (この製品は EOL になっており、後継として 5MP カメラ (PY260) を搭載した Unit CamS3-5MP が販売されています)

カメラ側は UnitCamS3(ESP32-S3)で JPEG を取得し、
micro-ROS で 画像データのメッセージを publish します。
main.cpp
#include <Arduino.h>
#include <micro_ros_platformio.h>
#include "secret.h"
#include <rcl/rcl.h>
#include <rclc/rclc.h>
#include <rclc/executor.h>
#include <esp_log.h>
#include <rosidl_runtime_c/string_functions.h>
#include <std_msgs/msg/int32.h>
#include <std_msgs/msg/float32.h>
#include <sensor_msgs/msg/compressed_image.h>
#include "esp_camera.h"
#define CAMERA_MODEL_M5STACK_CAMS3_UNIT
#include "camera_pins.h"
#if !defined(MICRO_ROS_TRANSPORT_ARDUINO_WIFI)
#error This example is only avaliable for Arduino framework with wifi transport.
#endif
// 定数定義
static const char* TAG = "FWE_NODE";
const char* NODE_NAME = "fwe_node";
const char* INT32_TOPIC = "/fwe_topic";
const char* SPEED_TOPIC = "/ego_vehicle/speedometer";
const char* IMAGE_TOPIC = "/ego_vehicle/rgb_front/image_compressed";
const unsigned int TIMER_TIMEOUT_MS = 1000;
// グローバル変数
rcl_publisher_t publisher;
std_msgs__msg__Int32 msg;
rcl_publisher_t speed_publisher;
std_msgs__msg__Float32 speed_msg;
rcl_publisher_t image_publisher;
sensor_msgs__msg__CompressedImage image_msg;
rclc_executor_t executor;
rclc_support_t support;
rcl_allocator_t allocator;
rcl_node_t node;
rcl_timer_t timer;
// エラーハンドルループ
void error_loop(rcl_ret_t error_code, const char* function_name) {
while(1) {
ESP_LOGE(TAG, "エラーが発生しました。関数: %s, エラーコード: %d, リカバリーのためループしています。", function_name, error_code);
delay(100);
}
}
#define RCCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){error_loop(temp_rc, #fn);}}
#define RCSOFTCHECK(fn) { rcl_ret_t temp_rc = fn; if((temp_rc != RCL_RET_OK)){} }
// Int32タイマーコールバック
void timer_callback(rcl_timer_t * timer, int64_t last_call_time) {
RCLC_UNUSED(last_call_time);
if (timer != NULL) {
// Int32メッセージをパブリッシュ
RCSOFTCHECK(rcl_publish(&publisher, &msg, NULL));
ESP_LOGD(TAG, "Int32メッセージをパブリッシュしました: %d", msg.data);
msg.data++;
// 速度データをパブリッシュ(テストデータ:0-120km/hの範囲で変動)
static float speed_counter = 0.0;
speed_msg.data = 30.0 + 20.0 * sin(speed_counter * 0.1); // 10-50km/hの範囲で変動
speed_counter += 1.0;
if (speed_counter > 62.8) speed_counter = 0.0; // 2π*10でリセット
RCSOFTCHECK(rcl_publish(&speed_publisher, &speed_msg, NULL));
ESP_LOGD(TAG, "速度メッセージをパブリッシュしました: %.2f km/h", speed_msg.data);
}
}
// LEDフラッシュ初期化(必要な場合のみ)
void setupLedFlash(int pin) {
pinMode(pin, OUTPUT);
digitalWrite(pin, LOW);
}
// カメラ初期化処理
bool init_camera() {
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sccb_sda = SIOD_GPIO_NUM;
config.pin_sccb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
#ifdef CAMERA_MODEL_M5STACK_CAMS3_UNIT
config.frame_size = FRAMESIZE_HD; // HD画質 (1280x720) に変更
#else
config.frame_size = FRAMESIZE_HD; // HD画質 (1280x720) に変更
#endif
config.pixel_format = PIXFORMAT_JPEG;
config.grab_mode = CAMERA_GRAB_WHEN_EMPTY;
config.fb_location = CAMERA_FB_IN_PSRAM;
config.jpeg_quality = 15; // HD画質に合わせて品質を調整
config.fb_count = 1;
if (config.pixel_format == PIXFORMAT_JPEG) {
if (psramFound()) {
config.jpeg_quality = 12; // HD画質用に品質を調整
#ifdef CAMERA_MODEL_M5STACK_CAMS3_UNIT
config.fb_count = 2;
config.frame_size = FRAMESIZE_HD; // HD画質に設定
#else
config.fb_count = 2;
config.frame_size = FRAMESIZE_HD; // HD画質に設定
#endif
config.grab_mode = CAMERA_GRAB_LATEST;
ESP_LOGI(TAG, "PSRAMあり: JPEG品質12, HD画質 (1280x720)");
} else {
config.frame_size = FRAMESIZE_VGA; // PSRAMなしの場合はVGA画質
config.fb_location = CAMERA_FB_IN_DRAM;
ESP_LOGI(TAG, "PSRAMなし: VGA画質 (640x480) - メモリ制限のため");
}
} else {
config.frame_size = FRAMESIZE_240X240;
#if CONFIG_IDF_TARGET_ESP32S3
config.fb_count = 2;
#endif
ESP_LOGI(TAG, "RGB/顔認識用設定");
}
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
ESP_LOGE(TAG, "カメラの初期化に失敗しました。エラーコード: 0x%x", err);
return false;
}
ESP_LOGI(TAG, "カメラの初期化が完了しました");
sensor_t *s = esp_camera_sensor_get();
if (s->id.PID == OV3660_PID) {
s->set_vflip(s, 1);
s->set_brightness(s, 1);
s->set_saturation(s, -2);
ESP_LOGI(TAG, "OV3660センサーの設定を調整しました: vflip=1, brightness=1, saturation=-2");
}
if (config.pixel_format == PIXFORMAT_JPEG) {
#ifdef CAMERA_MODEL_M5STACK_CAMS3_UNIT
s->set_framesize(s, FRAMESIZE_HD); // 1280x720
ESP_LOGI(TAG, "JPEGフォーマット: フレームサイズをHDに設定しました (1280x720)");
#else
s->set_framesize(s, FRAMESIZE_HD); // 1280x720
ESP_LOGI(TAG, "JPEGフォーマット: フレームサイズをHDに設定しました (1280x720)");
#endif
}
return true;
}
// 画像publish処理
void publish_camera_image() {
static uint32_t image_counter = 0;
// 画像送信頻度を下げる(5秒に1回)
if (image_counter % 5 != 0) {
image_counter++;
return;
}
image_counter++;
camera_fb_t *fb = esp_camera_fb_get();
if (fb && fb->format == PIXFORMAT_JPEG) {
ESP_LOGI(TAG, "画像を取得しました: %dバイト", fb->len);
// サイズチェック(HD画質用に100KB以下に制限)
if (fb->len > 102400) {
ESP_LOGW(TAG, "画像サイズが大きすぎます: %dバイト > 100KB、スキップします", fb->len);
esp_camera_fb_return(fb);
return;
}
image_msg.header.stamp.sec = (int32_t)(millis() / 1000);
image_msg.header.stamp.nanosec = (int32_t)((millis() % 1000) * 1000000);
image_msg.header.frame_id.data = (char*)"camera";
image_msg.header.frame_id.size = strlen("camera");
image_msg.header.frame_id.capacity = strlen("camera") + 1;
image_msg.format.data = (char*)"jpeg";
image_msg.format.size = strlen("jpeg");
image_msg.format.capacity = strlen("jpeg") + 1;
if (image_msg.data.capacity < fb->len) {
if (image_msg.data.data) free(image_msg.data.data);
image_msg.data.data = (uint8_t*)malloc(fb->len);
image_msg.data.capacity = fb->len;
ESP_LOGD(TAG, "画像バッファを再確保しました: %dバイト", fb->len);
}
memcpy(image_msg.data.data, fb->buf, fb->len);
image_msg.data.size = fb->len;
rcl_ret_t pub_ret = rcl_publish(&image_publisher, &image_msg, NULL);
if (pub_ret == RCL_RET_OK) {
ESP_LOGI(TAG, "画像をパブリッシュしました: %dバイト", fb->len);
} else {
ESP_LOGW(TAG, "画像のパブリッシュに失敗しました: %d", pub_ret);
}
esp_camera_fb_return(fb);
} else {
ESP_LOGW(TAG, "画像の取得に失敗したか、JPEGフォーマットではありません");
}
}
void setup() {
delay(2000);
Serial.begin(115200);
esp_log_level_set(TAG, ESP_LOG_DEBUG);
ESP_LOGI(TAG, "セットアップを開始します");
// micro-ROS WiFi設定
IPAddress agent_ip;
agent_ip.fromString(MICRO_ROS_AGENT_IP);
uint16_t agent_port = MICRO_ROS_AGENT_PORT;
char ssid[] = WIFI_SSID;
char password[] = WIFI_PASSWORD;
set_microros_wifi_transports(ssid, password, agent_ip, agent_port);
ESP_LOGI(TAG, "micro-ROS WiFiトランスポートを設定しました (SSID: %s, Agent IP: %s:%d)", ssid, MICRO_ROS_AGENT_IP, agent_port);
// WiFi接続とmicro-ROSエージェント接続の確立を待つ
ESP_LOGI(TAG, "micro-ROSエージェントとの接続を確立中...");
delay(5000); // WiFi接続の安定化を待つ
allocator = rcl_get_default_allocator();
// rclcサポート初期化(リトライ機能付き)
int retry_count = 0;
const int max_retries = 10;
rcl_ret_t ret;
while (retry_count < max_retries) {
ret = rclc_support_init(&support, 0, NULL, &allocator);
if (ret == RCL_RET_OK) {
ESP_LOGI(TAG, "rclc_support_initが完了しました(試行回数: %d)", retry_count + 1);
break;
} else {
retry_count++;
ESP_LOGW(TAG, "rclc_support_init失敗(試行 %d/%d)、エラーコード: %d", retry_count, max_retries, ret);
if (retry_count < max_retries) {
delay(2000); // 2秒待ってリトライ
}
}
}
if (ret != RCL_RET_OK) {
ESP_LOGE(TAG, "rclc_support_initが最大試行回数後も失敗しました");
error_loop(ret, "rclc_support_init");
}
// ノード作成
RCCHECK(rclc_node_init_default(&node, NODE_NAME, "", &support));
ESP_LOGI(TAG, "ノードを作成しました: %s", NODE_NAME);
// Int32パブリッシャ作成
RCCHECK(rclc_publisher_init_default(&publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Int32), INT32_TOPIC));
ESP_LOGI(TAG, "Int32パブリッシャを作成しました: %s", INT32_TOPIC);
// 速度パブリッシャ作成
RCCHECK(rclc_publisher_init_default(&speed_publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(std_msgs, msg, Float32), SPEED_TOPIC));
ESP_LOGI(TAG, "速度パブリッシャを作成しました: %s", SPEED_TOPIC);
// タイマー作成
RCCHECK(rclc_timer_init_default(&timer, &support, RCL_MS_TO_NS(TIMER_TIMEOUT_MS), timer_callback));
ESP_LOGI(TAG, "タイマーを作成しました: %dms", TIMER_TIMEOUT_MS);
// エグゼキュータ作成
RCCHECK(rclc_executor_init(&executor, &support.context, 1, &allocator));
RCCHECK(rclc_executor_add_timer(&executor, &timer));
ESP_LOGI(TAG, "エグゼキュータを作成しました");
msg.data = 0;
speed_msg.data = 0.0;
// 画像パブリッシャ作成
RCCHECK(rclc_publisher_init_default(&image_publisher, &node, ROSIDL_GET_MSG_TYPE_SUPPORT(sensor_msgs, msg, CompressedImage), IMAGE_TOPIC));
ESP_LOGI(TAG, "CompressedImageパブリッシャを作成しました: %s", IMAGE_TOPIC);
// カメラ初期化
if (!init_camera()) {
ESP_LOGE(TAG, "カメラ初期化に失敗しました");
error_loop(-1, "init_camera");
}
#if defined(LED_GPIO_NUM)
setupLedFlash(LED_GPIO_NUM);
ESP_LOGI(TAG, "LEDフラッシュ初期化");
#endif
}
void loop() {
delay(1000);
RCSOFTCHECK(rclc_executor_spin_some(&executor, RCL_MS_TO_NS(100)));
publish_camera_image();
}
UnitCamS3 に上記コードを PlatformIO で書き込みます。
pio run -e esp32s3box -t upload
シリアルログをモニターして、 Raspberry Pi の WiFi AP に接続し、 micro-ROS Agent に接続できていることを確認します。
全て問題なければ、画像とダミーの速度データを micro-ROS Agent に送信し始めます。
pio device monitor-b 115200
ROS 2 トピックを確認する
UnitCam からデータが publish され、 micro-ROS Agent によって ROS2 トピックにデータが正常に転送されていれば、RPi 上で次を実行するとトピックが確認できます。
docker run --rm --net=host --ipc=host \
-v /dev:/dev \
-v /dev/shm:/dev/shm \
-e ROS_DOMAIN_ID=0 \
-e RMW_IMPLEMENTATION=rmw_fastrtps_cpp \
ros:humble-ros-base \
bash -lc 'source /opt/ros/humble/setup.bash; ros2 topic list -t'
今回の場合だと、以下の2つが表示されます:
/ego_vehicle/rgb_front/image_compressed [sensor_msgs/msg/CompressedImage]/ego_vehicle/speedometer [std_msgs/msg/Float32]
Campaign をデプロイする
FleetWise は Campaign が有効化(承認)されてはじめてエッジに収集設定を配信します。
Campaign が WAITING_FOR_APPROVAL や SUSPENDED の状態だと、FWE 側ログで
Updating raw buffer configuration for 0 signals のように「収集対象 0」となり、S3 に送信されません。
マネージメントコンソールでキャンペーンを開き、「キャンペーンの概要」ページで「デプロイ」を選択します。
デプロイされると、 FWE のログに収集条件とデコーダーマニフェストを受信したログが確認できます。
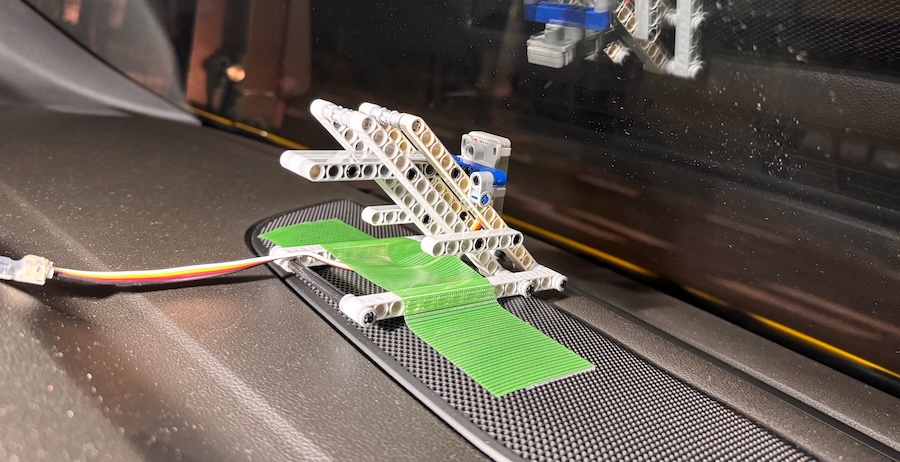
車両に載せてみる
レゴで組んだ台にカメラを取り付けて、ダッシュボードに載せてみました。
M5 Stack 製品はレゴ穴が開いているものが多いので、プロトタイピング時の機械的な取り付けが容易です。
実走して、 S3 にアップされた内容を確認してみる
走行後、S3 バケットを確認すると次の 3 つのフォルダができていました。
- raw-data/: FWE がアップロードしたファイル (Amazon Ion形式)
- processed-data/: FleetWise によってIonファイルからデコードされたデータ (Parquet 形式 )
- unstructured-data/: FleetWise によってIonファイルからデコードされたビジョンシステムデータ (画像など)
今回の場合は、 processd-data フォルダに速度データが Parquet 形式で格納されていました。
内容を確認してみると、以下のように画像データへのポインタ情報や、速度などの実データが格納されていました。
{
"campaignName": "Ros2Campaign",
"eventId": "1406428931",
"vehicleName": "vehicle-ros2-test",
"measure_name": "Vehicle.Cameras.Front.Image",
"time": 1765690035337,
"measure_value_STRUCT": {
"Types.sensor_msgs_msg_CompressedImage": {
"data": "s3://vision-system-data-123456789012-us-east-1/unstructured-data/c1387eca-6969-3366-9a42-c276f5fabf94-2025-12-14-05-27-15-337-vehicle-ros2-test-Vehicle.Cameras.Front.Image-data",
"format": "jpeg",
"header": {
"stamp": {
"sec": 17,
"nanosec": 667000000
},
"frame_id": "camera"
}
},
"Types.std_msgs_msg_Float32": null
}
},
{
"campaignName": "Ros2Campaign",
"eventId": "1406428931",
"vehicleName": "vehicle-ros2-test",
"measure_name": "Vehicle.Speed",
"time": 1765690036353,
"measure_value_STRUCT": {
"Types.sensor_msgs_msg_CompressedImage": null,
"Types.std_msgs_msg_Float32": {
"data": 41.29285
}
}
}
そして、 unstructured-data のほうの上記の S3 バケットの URI を確認してみると、画像ファイルとして保存されているのが確認できました。

まとめ
AWS IoT FleetWise の Vision System Data の仕組みを使うと、
車載カメラ画像のようなデータも最小限の設定で収集可能になります。
今回はカメラ画像を題材にしましたが、
Vision System Data は LiDAR のようなセンサーデータも収集可能です。
車両データ収集の基盤として IoT FleetWise は、最小限の設定で複数のデータ型(構造化・非構造化)を一元管理できるマネージドサービスですので、機会があればぜひ試してみて欲しいです。