【ブースレポート】AWS と NVIDIA による自動運転 / ADAS 向けワークロードの展示を訪問してきた #AWSSummit
こんにちは、製造ビジネステクノロジー部の若槻です。
2026 年 6 月 25 日〜26 日に幕張メッセで AWS Summit Japan 2026 が開催されました。
本記事では、その 2 日目に訪問した「AWS を使った自動運転 / ADAS ワークロード」ブースの展示内容をレポートします。NVIDIA と AWS の強力なパートナーシップによって実現された、自動運転・ADAS 向け開発プラットフォームを紹介する展示でした。
展示内容
ここからは、ブース担当者の方に説明していただいた展示内容を紹介します。

「AWS を使った自動運転 / ADAS ワークロード」ブース
自動運転 / ADAS 開発の全体像
自動運転・ADAS の開発では、「データ収集 → 学習 → 検証 → 車両への OTA アップデート → 再度データ収集」という継続的なデータループ(MLOps)を回します。学習して終わりではなく、実走行データで検証および改善をし続けるのがポイントです。

自動運転・ADAS 開発の継続的なデータループ(MLOps)
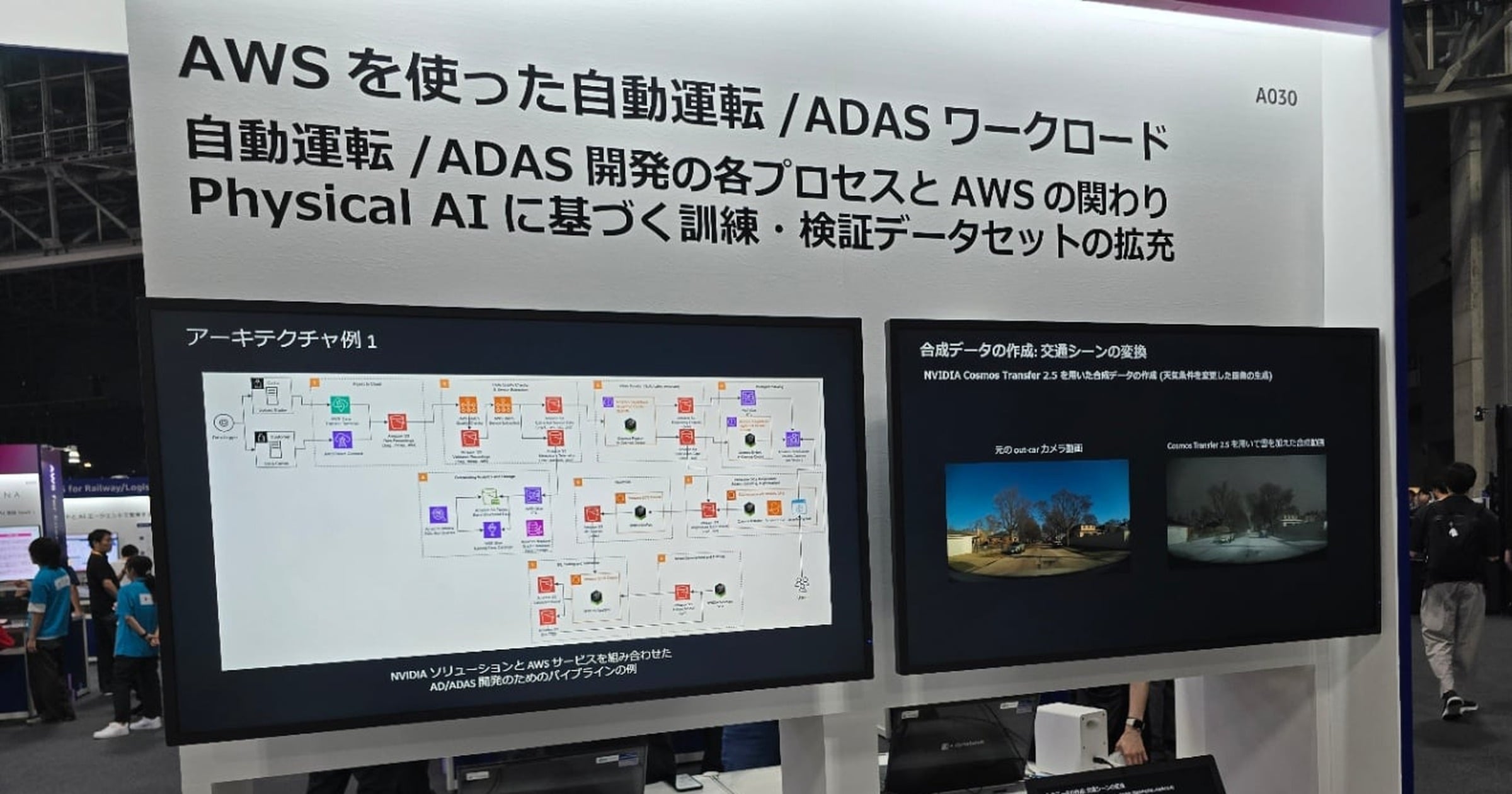
アーキテクチャ例①
まず展示されていたアーキテクチャ例です。NVIDIA のソリューションをパイプラインに全面的に採用しているのが見て取れます。

NVIDIA ソリューションを全面採用した自動運転・ADAS 向けアーキテクチャ例
NVIDIA と AWS の協業については、以下の NVIDIA 公式ブログでも紹介されています。
Physical AI 向けのデータ生成
Physical AI 向けの学習では、レアケースを人工的に作り出すことが重要になります。例えば道路陥没事故のような「学習していない状況」に自動運転は弱いためです。
そこで実写映像を NVIDIA Cosmos Transfer 2.5 が解析し、雪・夜・霧・雨などを自然な形で付加(天候変換)します。世界モデルによって「あり得る変化だけ」を反映した合成データを生成できる点が特徴です。

NVIDIA Cosmos Transfer 2.5 による天候変換の例
Cosmos Transfer 2.5 は、例えば屋根や道路は想定される表面素材や温度によって雪の積もり方が変わるなど、より自然に近い世界表現を再現できるとのことでした。
NVIDIA Cosmos について
NVIDIA Cosmos は、Physical AI 向けの世界基盤モデル(World Foundation Model)群です。以下の 3 つの世界基盤モデルで構成されています

NVIDIA Cosmos を構成する 3 つの世界基盤モデル(出典: NVIDIA Cosmos | ASK)
アーキテクチャ例②:データ前処理にフォーカス
次に、データ前処理にフォーカスしたアーキテクチャ例です。

データ前処理にフォーカスした自動運転・ADAS 向けアーキテクチャ例
このアーキテクチャの処理フローは以下のとおりです。
0. Car(車両でのデータ取得)
車両で走行データを取得します。
1. Ingest to Cloud(クラウドへの取り込み)
- AWS Data Transfer Terminal でクラウドへ取り込み
- 生データは Amazon S3(Raw Recordings)に保存
2. Data Quality Checks & Sensor Extraction(品質チェックと抽出)
- AWS Batch で動画・センサーデータを抽出
- 品質チェックや前処理を実施
3. Video Curation(動画キュレーション)
- NVIDIA Cosmos Curator / Amazon SageMaker HyperPod Cluster を利用
- 動画を分割・ラベル付け・アノテーション
- 学習や検索に使いやすいデータに整理
- 結果は Amazon S3(Curated Dataset)に保存
4. Search(検索)
- Amazon OpenSearch でベクトル・キーワード検索
- Amazon EKS 上の NVIDIA Cosmos Dataset Search も利用
- 欲しいシーンを自然言語や条件で検索
5. Interactive Data Manipulation / Augmentation(合成データ生成)
- 操作ツールでデータを確認・編集
- Amazon EC2 + NVIDIA GPU 上で NVIDIA Cosmos Transfer を実行
- 天候・時間帯・見た目などを変えた合成データを作成
- 結果は Amazon S3(Gold Dataset)に保存
6. Scene Reconstruction(シーンの 3D 再構築)
- NVIDIA Omniverse NuRec でシーンを 3D 再構築
- 結果は Amazon S3(3D Scenes)に保存
7. SIL Testing and Validation(シミュレーション検証)
- Amazon EC2 + NVIDIA GPU 上で NVIDIA AlpaSim を利用
- シミュレーションテストを実施
- 結果メトリクスは Amazon S3(Simulation Metrics)に保存
8. Model Development and Training(モデル開発・学習)
- NVIDIA Alpamayo VLA でモデル開発・学習
- Fine Tuning / Post Training / Reinforcement Learning を実施
- 結果を車両(Car)へフィードバック
このように、車両データ収集 → S3 保存 → 品質チェック → 動画整理 → 検索 → 合成データ作成 → 3D 再構築 → シミュレーション検証 → モデル学習という、MLOps を回すパイプラインとなっています。
このパイプラインについては、以下の AWS 公式ブログでも詳しく解説されています。
関連サービスの詳細
ここで、アーキテクチャに登場した主要なサービス・ツールを補足します。
AWS Data Transfer Terminal
AWS の拠点からデータ転送を行えるサービスです。
車両のようなエッジからも使えるようになったのでしょうか。気になるところです。
NVIDIA Cosmos Curator
動画キュレーションサービスです。出力先に Amazon S3 または NVIDIA DGX Cloud を指定できます。
AWS と NVIDIA の協業により、この辺りのデータ連携がスムーズになっている様子でした。
NVIDIA Cosmos Dataset Search
CDS と略されます。ビデオデータセットのベクトル検索機能が、ブループリントとして OSS 公開されています(つまりマネージドサービスではありません)。

NVIDIA Cosmos Dataset Search のブループリント(出典: cosmos-dataset-search | GitHub)
Docker Compose でのローカル開発、および Amazon EKS などの汎用 Kubernetes 基盤への展開が可能です。
NVIDIA Omniverse NuRec
カメラや LiDAR データを取り込んで 3D シミュレーション環境を作成できます。これによりロボットや自動運転向けエージェントのトレーニング・検証を行います。
NuRec は、OSS の自動車運転シミュレーターである CARLA との統合も可能とのことでした。
NVIDIA Alpamayo
CES 2026 で発表された新しいサービスで、自動運転向けのツール群が提供されます。
NVIDIA AlpaSim
NVIDIA Alpamayo ファミリーのうちの 1 ツールで、オープンソースの自動運転車シミュレーションプラットフォームです。
Cosmos Transfer による CARLA 映像の変換
CARLA で作った CG 映像だとリアリティが不足します。そこで Cosmos Transfer を使うと、夜景や濡れた路面、街灯の反射まで再現でき、より現実に近い学習データになります。

CARLA の CG 映像(左)と Cosmos Transfer による変換後(右)
Omniverse NuRec による視点生成
Omniverse NuRec を使うと、カメラ位置を 2m 左へずらした映像や 90 度横を向いた映像など、元の 2D 映像では存在しない視点を生成できます。歩行者や車を後から追加することも可能です。単なる動画生成ではなく、3D 世界の復元を行っている点が特徴です。

Omniverse NuRec による視点生成の例
実際の映像のみの使用が前提となるアラウンドビューモニターよりも、さらに踏み込んだ表現ができる印象でした。
自然言語検索機能
各動画を AI が Embedding 化するため、「歩きスマホ」「自転車」など自然言語で検索できます。これはアーキテクチャ例②の「4. Search」に対応する部分です。

自然言語による動画シーン検索の例
同じ自転車でも「歩道を走る自転車」「車道を走る自転車」「放置自転車」のような区別まで可能とのことでした。これにより、不必要な減速や停車を回避するような学習ができるそうです。
AWS と NVIDIA のパートナーシップ
AWS と NVIDIA のパートナーシップは 2010 年から続いており、今年で 16 年目になるとのことでした。

AWS と NVIDIA のパートナーシップの歩み
おわりに
GPU や AI 基盤のイメージが強い NVIDIA ですが、自動運転・ADAS 向けにもここまで包括的なソリューションを展開していることに驚きました。AWS との連携も含め、自動車業界への取り組みの本気度が伝わる展示でした。
余談ですが、今回ブース対応してくださったのは、AWS グローバルでプリンシパルソリューションズアーキテクトを務める梶本一夫(Kazuo Kajimoto)さんでした。(以下 AWS ブログの筆者)
梶本さんとは昨年参加した AWS re:Invent 2025 の以下の日産のセッションでエンカウントしていたようです。セレンディピティ!
なお本記事は、筆者のメモ(Zenn スクラップ)をベースに執筆しています。
以上