Unitree Go2 EDUで障害物を避けてみた
こんにちは。atsuです。
Unitree Go2 EDU のフロア巡回機能を9つに分解した全体像は、別記事で整理しています。本記事では、そのうち 障害物を避ける 機能を扱います。
Nav2 で目的地まで移動できるようになっても、実際のフロア巡回ではまだ足りないことがあります。保存済みの地図には壁や柱のような固定物は入っていますが、巡回中にだけ現れる人、椅子、段ボールなどは入っていません。
この「いま目の前にあるもの」を Nav2 が避けられる形にするために使うのが costmap です。この記事では Nav2 costmap の全機能を網羅するのではなく、Go2 EDU をフロア巡回ロボットとして動かすために、何を costmap に入れ、どこを確認しながら障害物回避を調整したかを扱います。
Go2 EDU(プリインストールのROS2 Foxy)と Nav2、開発PCは M3 Mac という構成です。ROS2 Foxy はすでに公式サポートを終えていますが、Go2実機側の環境に合わせています。マップ作成や自己位置推定などの前提は、本ブログの参考リンクにある過去記事で扱っています。
この記事の中心は、以下の関係です。
この記事でわかること
- Go2 の巡回で costmap がなぜ必要か
- 保存済みマップ、LiDAR、costmap の役割の違い
- local costmap と global costmap の見方
- Go2 の LiDAR(3D 点群)を costmap に入れるときに注意したこと
- 障害物回避が期待通りに動かないときの確認ポイント
先に用語を整理する
用語が多いので、まずは「もともとの地図」と「巡回中に見えている障害物」を分けて読むと追いやすいです。
| 用語 | 意味 | この記事での役割 |
|---|---|---|
| costmap | 通りやすさ、危険度を持つ 2D グリッド | 経路計算と障害物回避に使う |
| static layer | 保存済みマップを costmap に入れる層 | 壁や柱を経路計算に反映する |
| obstacle layer | センサーで見えた障害物を入れる層 | 人や椅子など、巡回中に現れたものを反映する |
| inflation layer | 障害物の周囲に余白を作る層 | 壁や障害物に近づきすぎないようにする |
この記事で主に見る ROS topic は以下です。
| topic | 何が流れるか | この記事での見方 |
|---|---|---|
/scan |
2D LiDAR スキャン | costmap に入る前の障害物入力を見る |
/local_costmap/costmap |
ロボット周辺の costmap | controller が避ける対象を見る |
/global_costmap/costmap |
広い範囲の costmap | planner が見る地図を確認する |
Planner(経路計算)や Controller(速度指令)は topic 名ではなく Nav2 の役割です。
Go2 が障害物を避ける流れ
冒頭の図を、Nav2 costmap の内側まで少し分解します。
なお、この図は簡略化しています。実際の Nav2 では global costmap と local costmap は別インスタンスとして動いており、planner_server は global costmap を、controller_server は local costmap を参照します。
Go2 EDU の LiDAR は周囲を3D点群として出します。一方、今回の Nav2 costmap では2Dのスキャンとして扱う構成にしています。そのため、Go2の3D点群を Nav2 が扱いやすい /scan に整えてから costmap に入れています。
costmap 自体は Nav2 の標準機能です。Go2 固有なのは、その手前で Go2 のセンサー情報を Nav2 が読みやすい形に整える部分です。
Go2の巡回で costmap が必要な理由
保存済みマップは、フロアの壁や柱を表す地図です。同じフロアを巡回するなら、この地図は何度も使えます。
ただし、実際のフロアは毎回同じ状態ではありません。椅子の位置が変わることもありますし、人が通路を横切ることもあります。保存済みマップだけを見て経路を引くと、地図上では通れる場所でも、実際には通れないことがあります。
costmap は、保存済みマップに「今見えている障害物」と「近づきすぎないための余白」を重ねた地図です。Nav2 の planner は global costmap を見て経路を考え、controller は local costmap を見ながら速度指令を出します。
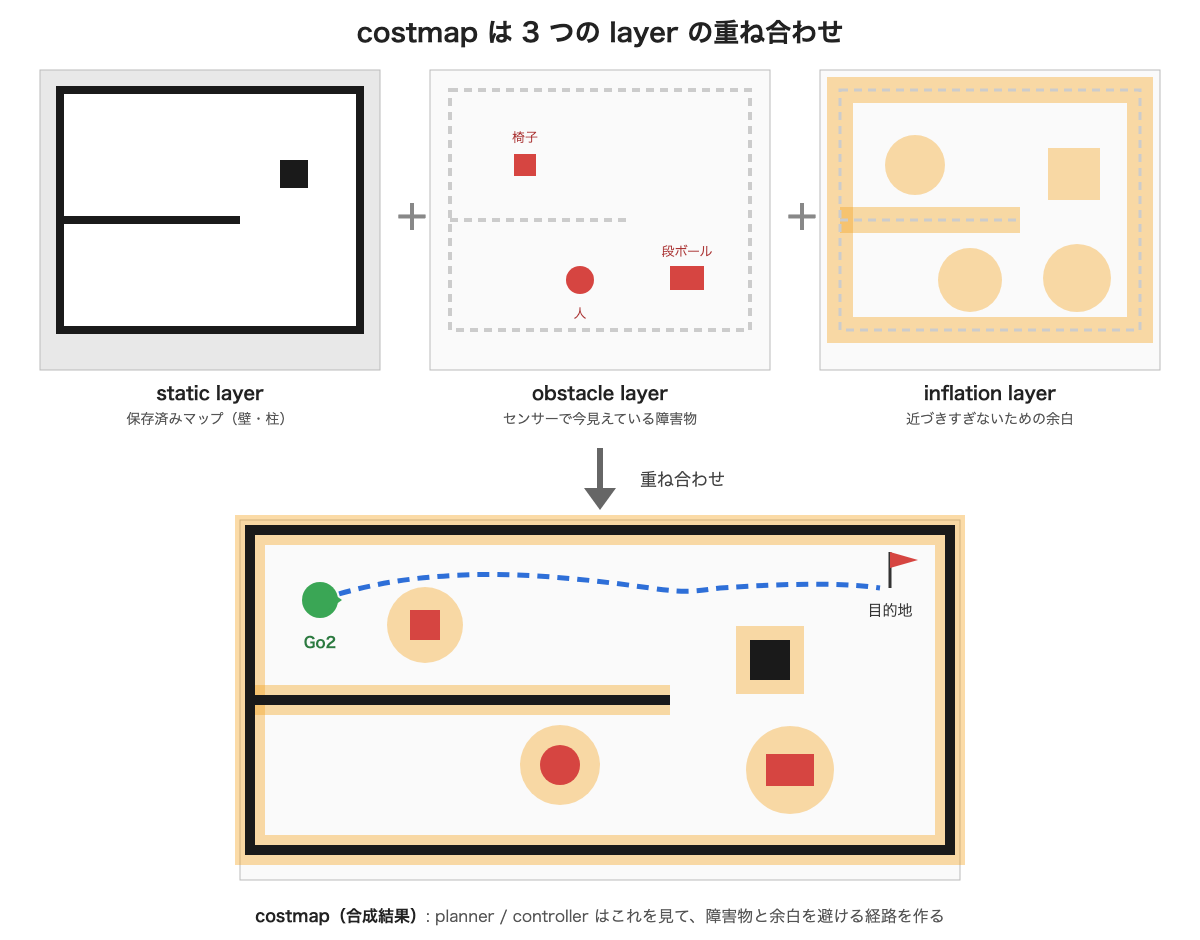
ロボットに詳しくない方向けに言うと、costmap はロボット用の「危険度つき床面図」です。ここを分けておくと、「地図は合っているのに Go2 が止まる」「何もないように見える場所を避ける」といった現象を切り分けやすくなります。
local costmap と global costmap
Nav2 では、主に local costmap と global costmap の 2 種類を使います。
| costmap | 見ている範囲 | 主な使い道 |
|---|---|---|
| global costmap | ゴールまでの広い範囲 | 大きな経路や迂回経路を考える |
| local costmap | Go2 の周辺 | 目の前の障害物を見ながら速度を決める |
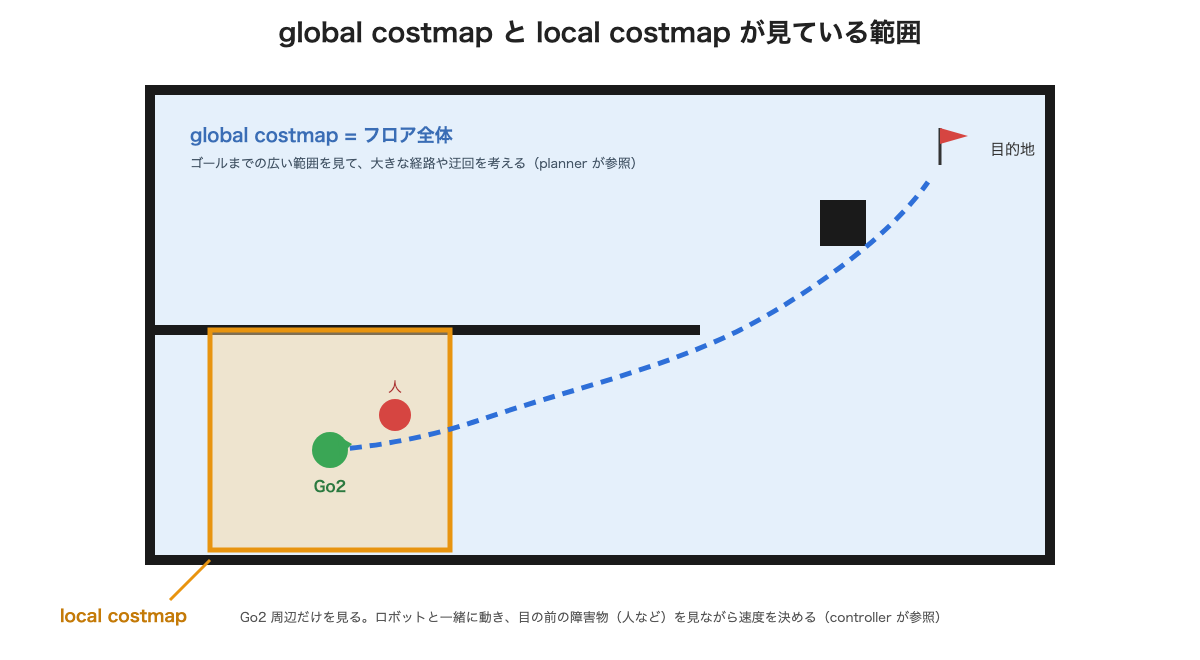
巡回中に人が横切るような場面では、local costmap の見え方が特に重要です。global plan は大きな方向を示し、controller が local costmap を見ながら実際の速度を調整します。
一方で、遠回りが必要な障害物や、通路全体が塞がっているような状況では global costmap も効いてきます。
Go2実機で costmap を使うために必要だった3つの対応
Go2 実機で Nav2 costmap を使うために、次の3つを意識しました。
- Go2 の 3D 点群を 2D スキャンとして扱える形に整える
- costmap layer の役割を分けて見る
- マッピング用と巡回用でセンサー処理の設定を分ける
1. Go2 の3D点群を2Dスキャンとして整える
前述のとおり、Go2 の3D点群は2Dの /scan に変換してから costmap に入れています。
このとき、Go2自身の体に当たった反射や、床面近くのノイズをそのまま入れると、Nav2 はそれも障害物として扱います。実際には通れる場所でも、costmap 上では前が塞がっているように見えることがあります。
そのため、3D点群から2Dスキャンへ整える段階で、高さ、距離、孤立点のフィルタを入れました。変換は自作のブリッジノードで行っています(標準の pointcloud_to_laserscan パッケージ相当の変換に、上記のフィルタを加えたもの)。Nav2 の costmap パラメータを調整する前に、まず /scan が妥当かを見るようにしています。
2. costmap layer の役割を分けて見る
costmap は1枚の地図に見えますが、内部では複数の layer を重ねています。
| layer | 何を担当するか | 調整を間違えたときに起きること |
|---|---|---|
| static layer | 保存済みマップを入れる | 壁に近い経路を引く、存在しない壁を避ける |
| obstacle layer | センサーで見えた障害物を入れる | 人や椅子を無視する、何もない場所で止まる |
| inflation layer | 障害物の周囲に余白を作る | 大回りしすぎる、障害物に近づきすぎる |
Nav2 公式ドキュメントでも、costmap は planner や controller が衝突や高コスト領域を確認するために使う 2D グリッドとして説明されています。Obstacle Layer は 2D raycasting を使ってセンサー情報を costmap に入れ、Inflation Layer は障害物の周囲にコストを広げます。
実機では、「どの layer の問題か」を分けて見るのが大事でした。たとえば Go2 が何もない場所で止まる場合、inflation が強すぎることもあれば、obstacle layer に古い障害物が残っていることもあります。見た目は同じ「止まる」でも、見る場所が変わります。
3. マッピング用と巡回用で設定を分ける
マップ作成では、壁の形を安定して取りたいのでノイズ除去を強めたくなります。一方、巡回では低い障害物も見たいので、低い点を落としすぎると困ります。
1つの設定で全部を賄おうとすると、マップ作成ではノイズが増え、巡回では低い障害物を見落とす、といったトレードオフが生じます。
そのため、この環境では3D点群から2Dスキャンへ整える設定を、マップ作成用と巡回用で分けました。マップを作るときは地図の安定性を優先し、巡回するときは障害物検知と停止しやすさを優先しています。具体的には、高さフィルタの下限をマッピング時は LiDAR の取り付け高さ、巡回時は地面から約10cm に設定しました。
Go2 の障害物回避を確認するポイント
障害物回避が期待通りに動かないときは、最初から Nav2 全体を疑うより、情報の流れに沿って見る方が切り分けやすいです。
# Foxy の ros2 topic echo には --once オプションが無いため、内容を確認したら Ctrl+C で停止します
# --no-arr は配列フィールドの中身を省略表示するオプションです
ros2 topic echo /scan --no-arr
ros2 topic echo /local_costmap/costmap --no-arr
ros2 topic echo /global_costmap/costmap --no-arr
ros2 topic echo /plan --no-arr
ros2 topic echo /cmd_vel
echo ではまず各 topic が流れているかを確認します。そのうえで、/scan の障害物が local costmap や global costmap に反映されているか、/plan(planner が計算した経路)が障害物を避ける形になっているか、/cmd_vel が減速や停止につながっているかを順番に見ます。なお、/cmd_vel は Nav2 がナビゲーションを実行している間しか流れません。echo しても何も表示されない場合は、ナビゲーション中かどうかを先に確認します。
障害物がどう見えているかは echo だけでは追いにくいので、可視化ツールの Foxglove Studio で /scan, /local_costmap/costmap, /global_costmap/costmap, /plan, /cmd_vel を同時に見ると確認しやすいです。Go2 実機が止まった瞬間に、どこまで情報が伝わっていたかを確認できます。
切り分けの順番は次のようにしました。
| 観察 | 次に見るところ |
|---|---|
/scan が想定と違う |
3D点群から2Dスキャンへの整え方、高さフィルタ、距離設定 |
/scan は正しいが costmap が想定と違う |
obstacle layer、clearing(見えなくなった障害物を costmap から消す処理)、TF |
costmap は正しいが /plan が想定と違う |
global planner、inflation radius |
/plan は正しいが Go2 の動きが不自然 |
controller、速度制限 |
Go2実機でつまずいたところ
Go2実機では、costmap の設定だけでは説明しきれない場面がありました。つまずいた点は次の2つです。
| つまずいた点 | 何を見たか | 対応したこと |
|---|---|---|
| 何もない場所に障害物が残る | /scan と local costmap |
3D点群から2Dスキャンへ整える段階でノイズを減らす |
| 障害物が消えた後も避け続ける | /scan と /local_costmap/costmap_updates |
clearing と costmap 更新の効き方を見る |
何もない場所に障害物が残る
Go2 自身の反射や歩行中の揺れで、実際には何もない場所に障害物が残ることがありました。これが local costmap に残ると、controller は「前が塞がっている」と判断します。
この場合、costmap のパラメータだけを見ても原因をつかみにくいです。私はまず /scan を見て、costmap に入る前のデータに不要な点が含まれていないか確認してから、前述のフィルタ(高さ、距離、孤立点)を調整しました。
障害物が消えた後も避け続ける
障害物が視界から消えたあと、costmap から消えるまでに遅れがあると、Go2は何もない場所を避け続けるように見えます。
このときは、/scan と /local_costmap/costmap_updates(local costmap の差分更新 topic)を並べて確認しました。/scan から障害物が消えているのに costmap 側に残る場合は、clearing や TF、更新タイミングを確認対象にしました。
運用上の見立て
巡回ロボットの障害物回避では、完璧な認識よりも「危ないときに止まれる」「何もない場所では止まりすぎない」のバランスが大事でした。
Go2 のような四足歩行ロボットでは、歩行振動とセンサー反射の影響があります。そのため、最初は保守的に止まれる設定から始め、実機で少しずつ調整する方が安全でした。
もう1つ大事なのは、障害物回避を「最短経路で通れるか」だけで評価しないことです。巡回ロボットは人のいる空間に入るので、経路の短さよりも「見ていて不安にならない距離感」を優先して調整する方が、Go2のフロア巡回には合っていると感じました。
まとめ
Go2 EDU の障害物回避は、Nav2 costmap と、costmap に入る前の /scan を整える処理を組み合わせて実現しました。
- Go2 の障害物回避では、保存済みマップに今見えている障害物と余白を重ねて考える
- local costmap は Go2 周辺の回避、global costmap は大きな迂回経路を見る
- Go2 自身の反射や歩行ノイズは、costmap に入る前の
/scan側でも確認する - 期待通りに動かないときは、
/scan→ costmap →/plan→/cmd_velの順に切り分ける