Isaac Simの基本的な操作方法を解説する
はじめに
以前の記事ではIsaac Simのインストールと起動確認までを行いました。
本記事では、Isaac SimのGUI操作に焦点を当て、基本的な操作を見ていきます。
Isaac Simにはターミナルからスクリプトを実行するモードもありますが、まずGUIで基本操作を把握しておくとその後の理解がスムーズです。
関連記事
今回試した環境
- OS: Ubuntu 24.04 LTS(x86_64)
- GPU: NVIDIA GeForce RTX 5090
- Isaac Sim: 5.1.0
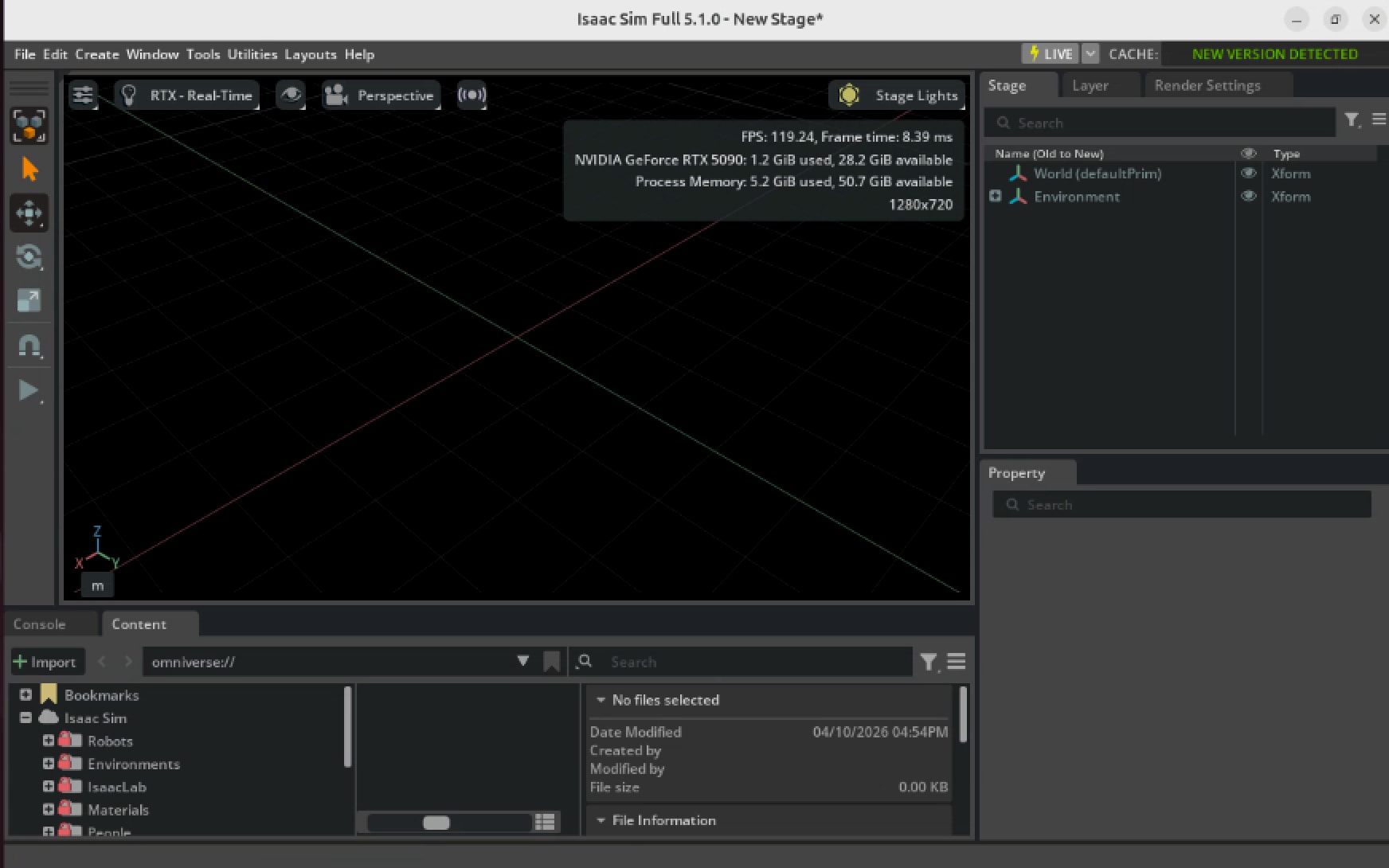
Isaac Simの画面構成
Isaac Simを起動すると、以下の要素で構成された画面が表示されます。
| 要素 | 位置 | 役割 |
|---|---|---|
| メニューバー | 画面最上部 | File, Edit, Create, Window, Tools, Help など |
| ツールバー | 左側 | Select/Play/Stop/Pauseボタン、Move/Rotate/Scaleなどの操作ツール |
| ビューポート | 中央 | 3Dシーンが表示される領域 |
| Stageパネル | 右上 | シーン内のすべてのオブジェクト(プリム)をツリー表示 |
| Propertyパネル | 右下 | 選択中のオブジェクトのプロパティを表示・編集 |
| Content / Console | 下部 | アセットの参照やログの確認 |
ウィンドウのレイアウトはカスタマイズ可能です。パネルをドラッグして並べ替えたり、メニューバーの Window から各種パネルの表示・非表示を切り替えられます。
まずはオブジェクトを置いてみる
起動直後のIsaac Simは空のステージにデフォルトライトがあるだけで、ビューポートには何も映っていません。カメラ操作を試すにもまず操作対象が必要なので、最初にオブジェクトを追加します。
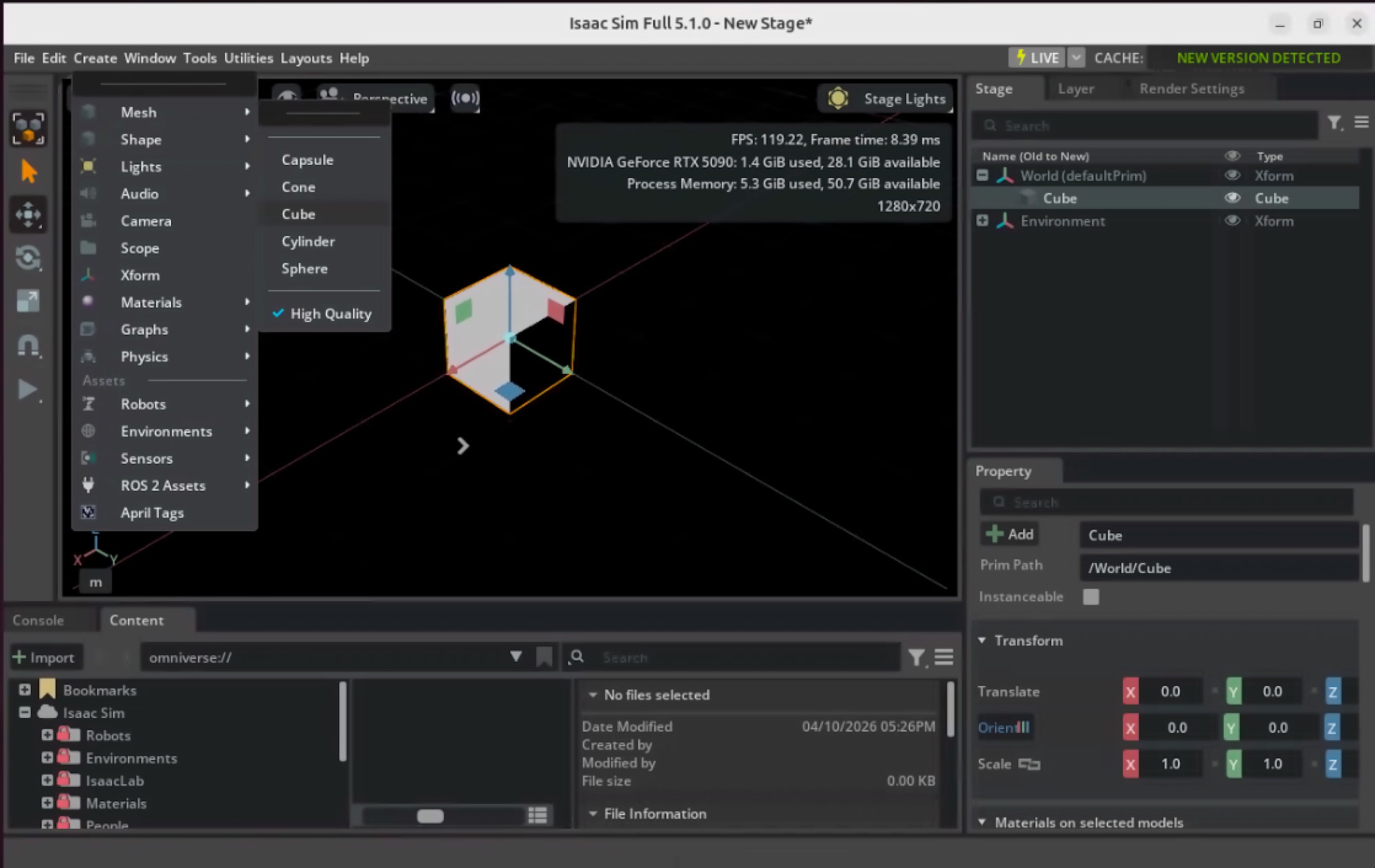
基本的なシェイプの追加
メニューバーから Create > Shapes > Cube を選択すると、ビューポート中央にCubeが配置されます。オレンジ色のハイライトで選択状態になっているはずです。
これでビューポートに操作対象ができました。
Sphereなど他のシェイプも Create > Shapes から追加できます。
オブジェクトの移動・回転・拡大縮小
Cubeが選択された状態で、以下のキーボードショートカットでギズモ(操作用の矢印やリング)を切り替えられます。
| キー | 操作 | 説明 |
|---|---|---|
| W | Move(移動) | 矢印ギズモが表示され、ドラッグで移動 |
| E | Rotate(回転) | 回転ギズモに切り替わる |
| R | Scale(拡大縮小) | スケールギズモに切り替わる |
ビューポートのカメラ操作
Cubeをステージに置いたので、視点を動かしてさまざまな角度から見てみましょう。
| 操作 | マウス操作 |
|---|---|
| 視点の回転 | 右クリックしながら動かす |
| 視点の移動 | マウス中ボタン(ホイール)を押しながらドラッグ |
| ズーム | マウスホイールをスクロール |
オブジェクトへのフォーカス
Stageパネル(またはビューポート上)でオブジェクトを選択して Fキー を押すと、そのオブジェクトにカメラがフォーカスします。
視点操作で困ったときの復帰方法
ズームやオービットの基準点がシーンから大きく離れてしまうと、ホイール操作が急に効かなくなることがあります。
この場合も、Stageパネルでオブジェクトを選択してFキーでフォーカスし直すと復帰できます。操作不能になった際のために覚えておくと便利です。
シーンをシミュレーション用に整える
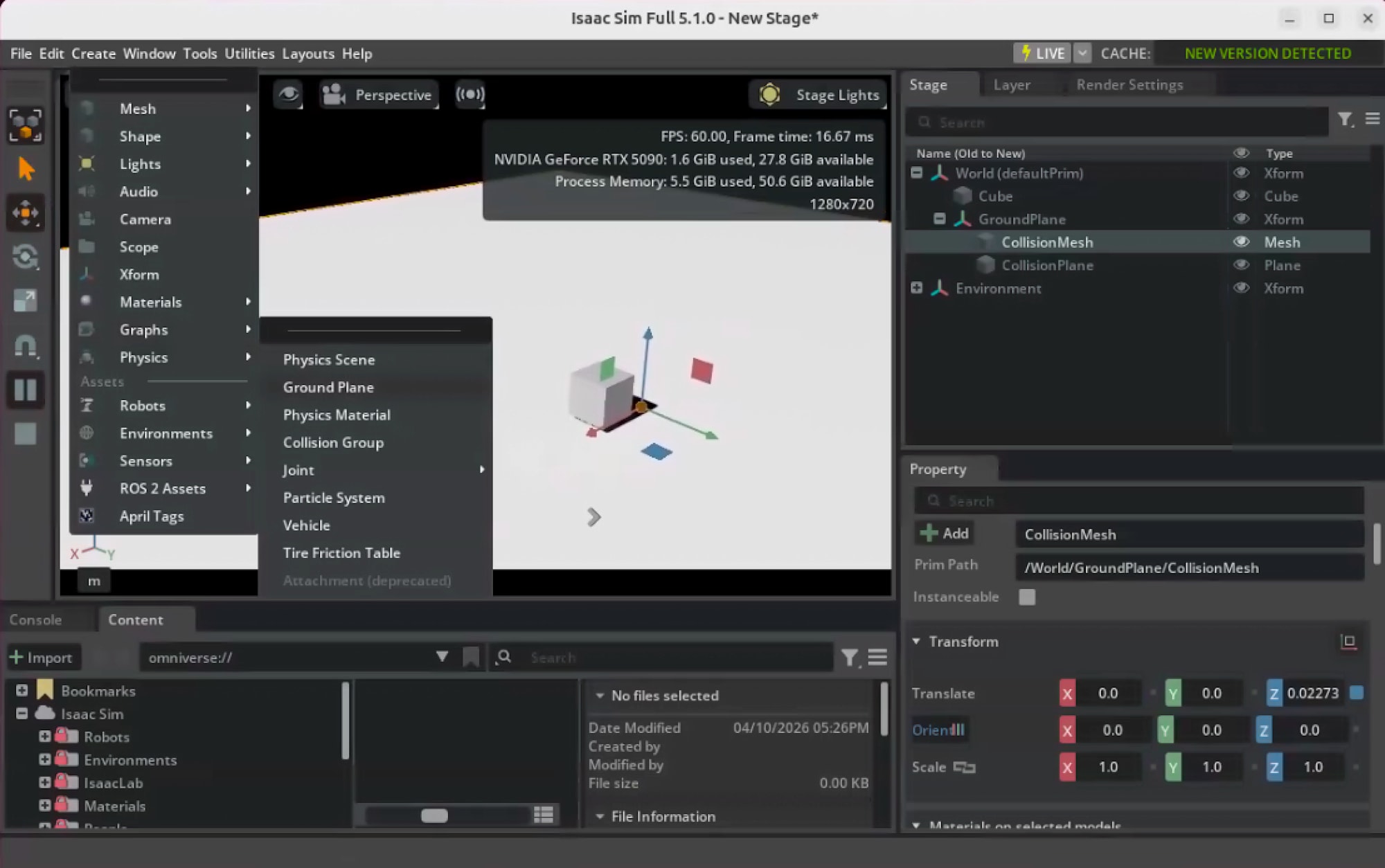
Ground Plane(地面)の追加
Create > Physics > Ground Plane で地面を追加できます。
先ほど追加したCubeには物理プロパティが付いていないため落下しませんが、ロボットなど物理プロパティが設定されたアセットは再生と同時に重力で落下します。地面がないとそのまま画面外へ消えてしまうので、あらかじめ追加しておきましょう。
ライトの追加
シーンにライトがないと、オブジェクトがあっても真っ暗です。初回起動時はデフォルトライトが配置されていますが、新規シーンを作成した場合は自分でライトを追加する必要があります。
Create > Lights から以下のライトを追加できます。
| ライトの種類 | 特徴 |
|---|---|
| Distant Light | 太陽光のような平行光源。シーン全体を一方向から照らす |
| Dome Light | 環境光。シーン全体を均一に照らす |
| Sphere Light | 点光源。電球のように特定の位置から光を放つ |
| Rect Light | 面光源。写真撮影のソフトボックスのようなイメージ |
| Disk Light | 円形の面光源 |
| Cylinder Light | 円筒形の光源 |
Stageパネルとプリムの概念
Isaac SimはOpenUSD形式でシーンデータを管理しています。USDにおける最も基本的な構成単位がプリムです。
Stageパネルはシーン内のすべてのプリムをツリー構造で表示します。
/World ← シーンのルート
├─ GroundPlane ← 追加した地面
└─ Cube ← 追加した立方体
プリムには以下のような種類があります。
| プリムタイプ | 説明 |
|---|---|
| Xform | 位置・回転・スケールの情報を持つ |
| Mesh | 3Dメッシュデータ |
| Camera | カメラ |
| Light | ライト |
Stageパネルでプリムを選択すると、Propertyパネルにそのプリムのプロパティが表示されます。Transform(位置・回転・スケール)の値を変更することで、オブジェクトを移動・回転させることができます。
物理シミュレーションの実行
再生・停止の基本
ツールバーの ▶(Play)ボタン を押すと物理シミュレーションが開始されます。
| ボタン | 動作 |
|---|---|
| ▶ Play | シミュレーション開始。押すとPauseボタンに変わる |
| ⏸ Pause | シミュレーション一時停止。現在の状態を保持したまま止まる |
| ⏹ Stop | シミュレーション停止。シーンが初期状態にリセットされる |
再生中はオブジェクトのTransformを手動で変更できません。変更したい場合は一度Stopしてから操作してください。
物理プロパティの追加
Create > Shapes で追加したCubeには、デフォルトでは物理プロパティが付いていません。そのため、再生してもCubeは何も起きずその場に浮いたままです。
物理プロパティを追加するには、Cubeを選択した状態でPropertyパネルの Add > Physics から以下を追加します。
- Rigid Body: 剛体物理を適用。重力の影響を受けるようになる
- Collider Presets: 衝突判定を追加。他のオブジェクトとぶつかるようになる
両方を追加して再生すると、CubeがGround Planeに落下して止まります。
ロボットアセットの読み込み
Isaac Sim Assetsからの読み込み
Isaac Simではロボットアセットがクラウドホストされており、Asset Browser経由でアクセスできます。
メニューバーの Window > Browsers からIsaac Sim Assetsを選択、画面下部でIsaac Sim Assets タブを選択します。検索バーでロボット名(例: Franka, G1)を検索し、見つかったアセットをステージにドラッグ&ドロップします。もしくは、アセット上で右クリック > Add at Current Selectionでも配置可能です。
ロボットが地面に埋まって下半身が見えない場合は、ロボットのルートプリムのTransformでZ値(高さ方向)を調整してください。(直接掴んでドラッグで移動でもOKです)
※アセットの読み込みに時間がかかるため、すぐには検索に出ないかもです。
Asset Browserで検索しても何も表示されない場合は、ネットワーク環境の問題でクラウドのアセットにアクセスできていない可能性があります。その場合はローカルにアセットパックをダウンロードして配置する方法もあります。詳しくは公式ドキュメントのAssetsを参照してください。

プリセットロボットとサンプルデモ
プリセットロボットの追加
メニューバーの Create > Robots から、Franka Emika Panda Armなどのプリセットロボットをワンクリックで追加できます。
Robotics Examples
Window > Examples から Robotics Examples を開くと、さまざまなロボット制御のデモが用意されています。ここでPOLICYカテゴリのデモを選択してLOADを押すと、学習済みポリシーによるロボットの動作を確認できます。
Script Editorの使い方
Isaac SimにはPythonスクリプトを直接実行できるScript Editorが組み込まれています。Window > Script Editor で開けます。
GUIで操作できることは基本的にPythonでも実現可能です。以下はScript Editorから地面を追加し、Cubeを作成して物理を付与する例です。
import omni.usd
from pxr import UsdGeom, UsdPhysics, Gf, Sdf
stage = omni.usd.get_context().get_stage()
# Ground Planeの追加
from isaacsim.core.api.objects.ground_plane import GroundPlane
GroundPlane(prim_path="/World/GroundPlane", z_position=0)
# Cubeの追加
cube_path = "/World/MyCube"
cubeGeom = UsdGeom.Cube.Define(stage, cube_path)
cubeGeom.CreateSizeAttr(0.5)
# 位置を設定
cubePrim = stage.GetPrimAtPath(cube_path)
xform = UsdGeom.Xformable(cubePrim)
xform.AddTranslateOp().Set(Gf.Vec3d(0, 0, 2.0))
Asset Browserからドラッグ&ドロップしたロボットは「リファレンス」として読み込まれるため、GUIのPropertyパネルからTransformを直接編集できないことがあります。その場合、Script Editorからプリムの位置を変更するのが確実です。
import omni.usd
from pxr import UsdGeom, Gf
stage = omni.usd.get_context().get_stage()
prim = stage.GetPrimAtPath("/World/g1") # パスはStageパネルで確認
xform = UsdGeom.Xformable(prim)
xform.ClearXformOpOrder()
xform.AddTranslateOp().Set(Gf.Vec3d(0, 0, 1.0))
GUIとスクリプト実行の使い分け
Isaac Simには大きく分けて2つの使い方があります。
| モード | 用途 |
|---|---|
| GUIモード | シーンの構築・確認、アセットの調査、デバッグ |
| スクリプトモード | RL学習、大量並列シミュレーション、自動化 |
GUIモードは「Isaac Simってこういうものか」を体感するのに最適です。シーンにロボットを置いて物理を走らせて、ビューポートを回してプリムの構造を確認する。この感覚を掴んでおくと、スクリプトモードに移行した際にもコードが何をしているか理解しやすくなります。
たとえば、大量のロボットを並列で歩かせるようなデモは、GUIだけでは厳しいです。Isaac Lab経由でターミナルからtrain.pyやplay.pyを実行することで、数千体のロボットが同時にシミュレーションされる世界に入ります。
よくあるトラブルと対処法
| 症状 | 原因 | 対処法 |
|---|---|---|
| 再生するとカメラが真っ暗になる | 地面がなくオブジェクトが無限落下している | Create > Physics > Ground Plane で地面を追加 |
| ロボットの下半身が見えない | 地面に埋まっている | ロボットのZ位置を1.0程度に上げる |
| ホイールでのズームが効かなくなる | カメラの基準点がずれた | Stageでオブジェクトを選択してFキーでフォーカス |
| Transformの値が編集できない | 再生中、またはリファレンスで読み込んだプリム | Stopしてから操作、またはScript Editorで変更 |
| Asset Browserで何も表示されない | ネットワーク環境の問題 | ローカルにアセットパックをダウンロードして配置 |
| 初回起動が非常に遅い | アセットのビルド・キャッシュ生成中 | 「応答を待つ」を選択して待つ。 |
まとめ
本記事ではIsaac SimのGUI操作の基本を解説しました。(5.1.0時点)
皆さんもぜひ触ってみてください。