![[アップデート] Kiro CLI 2.7 に /goal コマンドと Queue Steering が追加され、エージェントの自律実行と途中介入がしやすくなりました](https://images.ctfassets.net/ct0aopd36mqt/4uTbTE9O9jUJCOs80dZ0Ao/e2da592b5eaaad0f5993d6ff64a12467/aws-kiro.png?w=3840&fm=webp)
[アップデート] Kiro CLI 2.7 に /goal コマンドと Queue Steering が追加され、エージェントの自律実行と途中介入がしやすくなりました
いわさです。
Kiro CLI 2.7.0 がリリースされ、/goal コマンド、Queue Steering、/rewind の表示強化が追加されました。
今回こちらを確認してみたので紹介します。
/goal コマンドを使ってみる
/goal コマンドは、エージェントにゴールを設定して自律的にループ実行させる機能です。
通常のプロンプトとの違いは、エージェントが実装だけでなく自己検証も行い、受入基準を満たすまで繰り返し作業する点です。
デフォルトでは最大 5 イテレーションで、受入基準を満たさない場合は実装と検証を最大 5 回まで繰り返します。
5 回で完了しなかった場合はそこで止まるので、無限ループにはなりません。
--max オプションで回数を変更できるみたいです。
公式ドキュメントによると、ゴールの記述から受入基準を自動で導出するため、「テストが全部通る」「TypeScript エラーがない」のように具体的な完了条件を書くのが効果的とのこと。
The agent derives acceptance criteria from your goal statement. Be explicit about what "done" looks like — "all tests pass" or "no TypeScript errors" gives the agent a concrete verification target.
では実際に試してみます。
/goal と入力するとコマンドの補完が表示されます。

今回は hello.py を作成して実行確認するシンプルなゴールを設定してみました。
/goal hello.py を作成して "Hello from Kiro" と出力されることを確認して
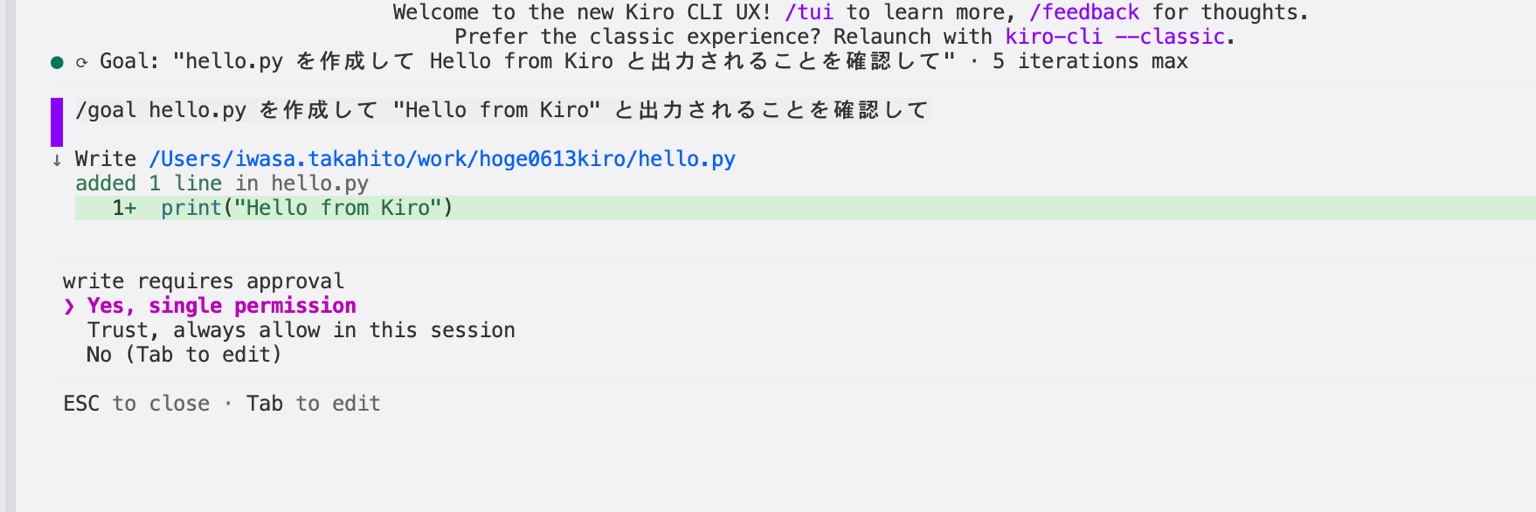
画面上部に Goal: "hello.py を作成して Hello from Kiro と出力されることを確認して" · 5 iterations max と表示されています。
エージェントがファイルを作成し、実行して出力を確認した上で「Goal complete」と表示されました。
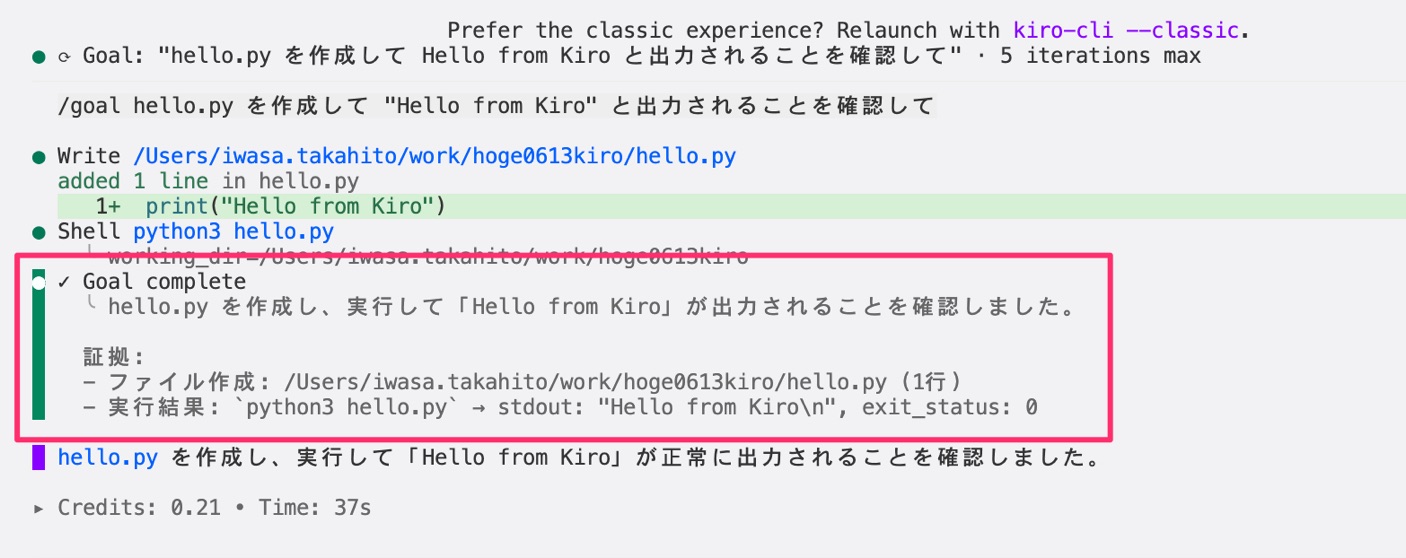
完了時に「証拠」セクションが出力され、ファイル作成と実行結果(stdout: "Hello from Kiro\n", exit_status: 0)が記載されています。
通常のプロンプトだと「作成しました」で終わりがちですが、/goal では実行して確認するところまで自動でやってくれるのが違いですね。
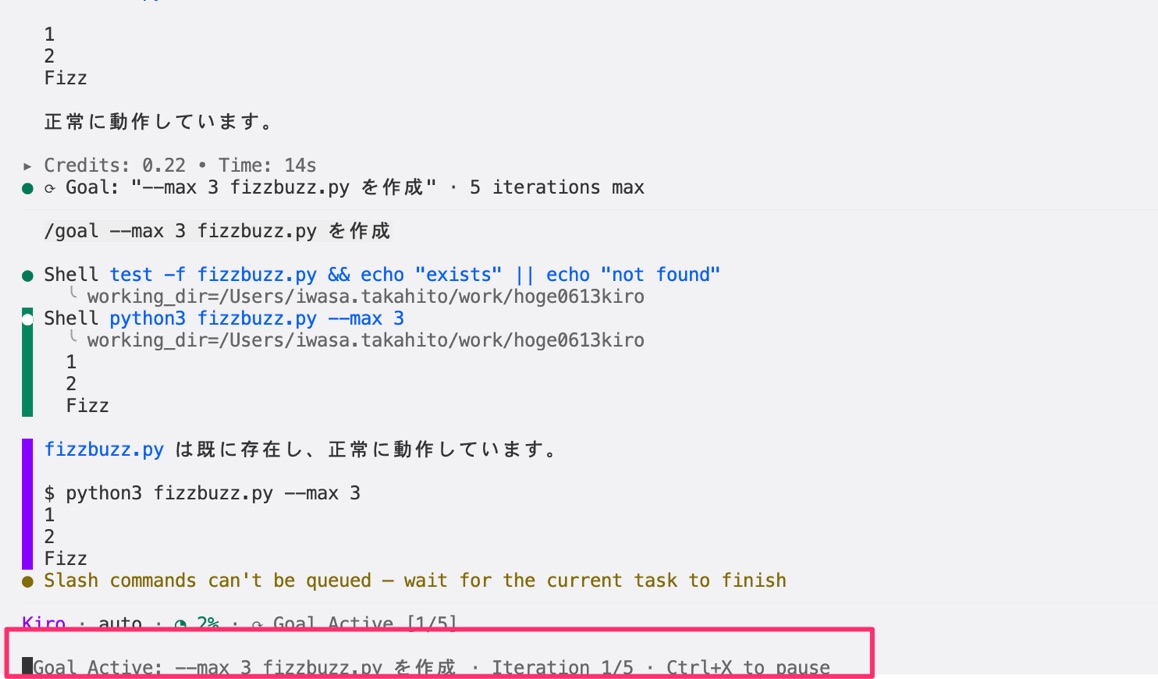
なお、ゴール実行中は画面下部に Goal Active: ... · Iteration 1/5 · Ctrl+X to pause のようにステータスが表示されます。
Queue Steering を使ってみる
Queue Steering は、エージェントが作業中にメッセージを送って方向修正できる機能です。
従来はエージェント作業中にできることは Ctrl+C でキャンセルするだけで、途中で「やっぱりこっちにして」と伝えたい場合も一度止めて最初からやり直す必要がありました。
Queue Steering では、作業中のままメッセージを送れるようになっています。
2 つのモードがあり、Ctrl+S で切り替えます。
公式ドキュメントによると、Steer モード(デフォルト)ではメッセージがツール境界で即座に注入され、Queue モードではターン終了後にまとめて送信されるみたいです。
In steer mode, your message is injected at: Tool boundaries — after a tool completes but before the next tool starts
Steer モード(デフォルト)
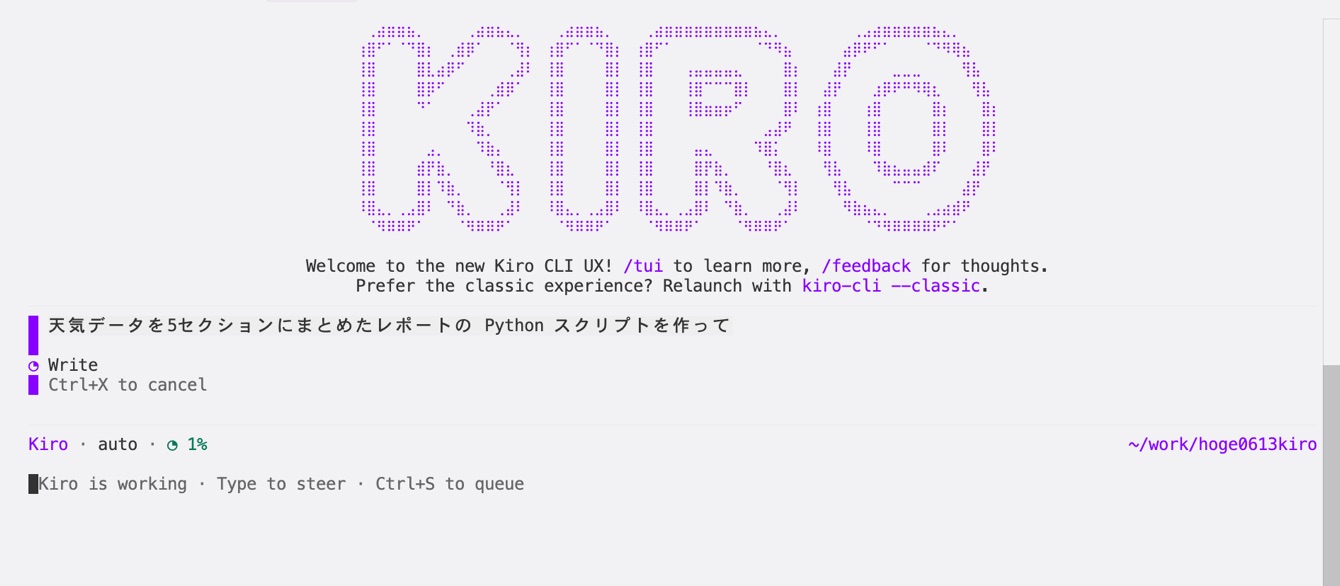
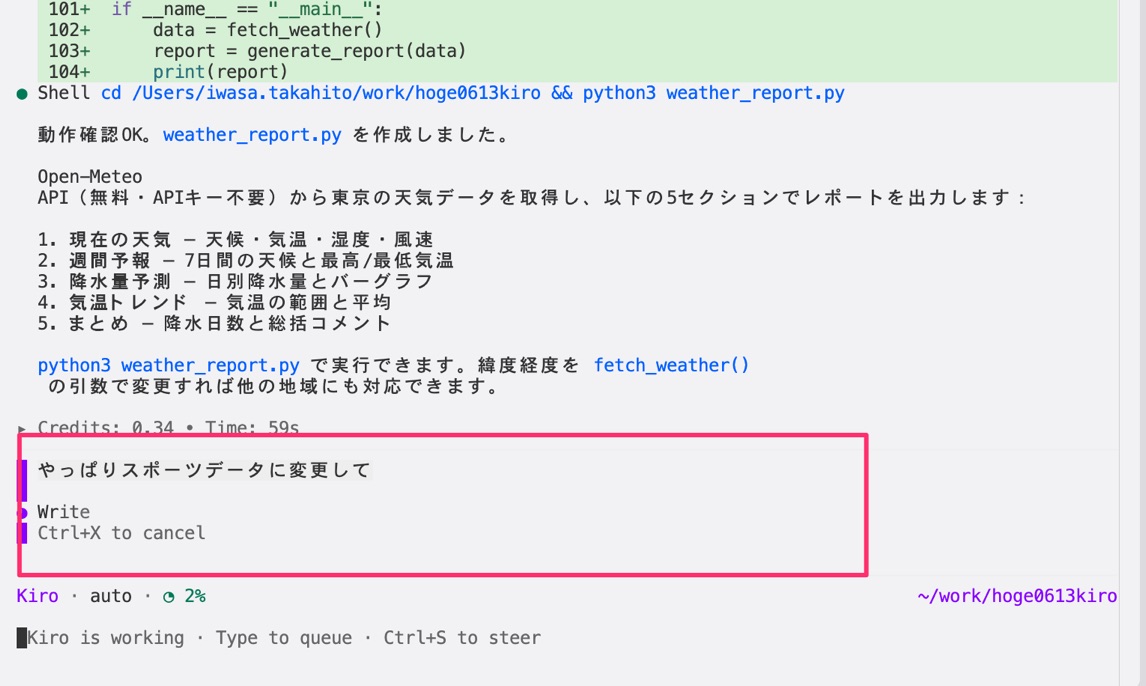
エージェントにタスクを送って作業が始まると、画面下部に Kiro is working · Type to steer · Ctrl+S to queue と表示されます。
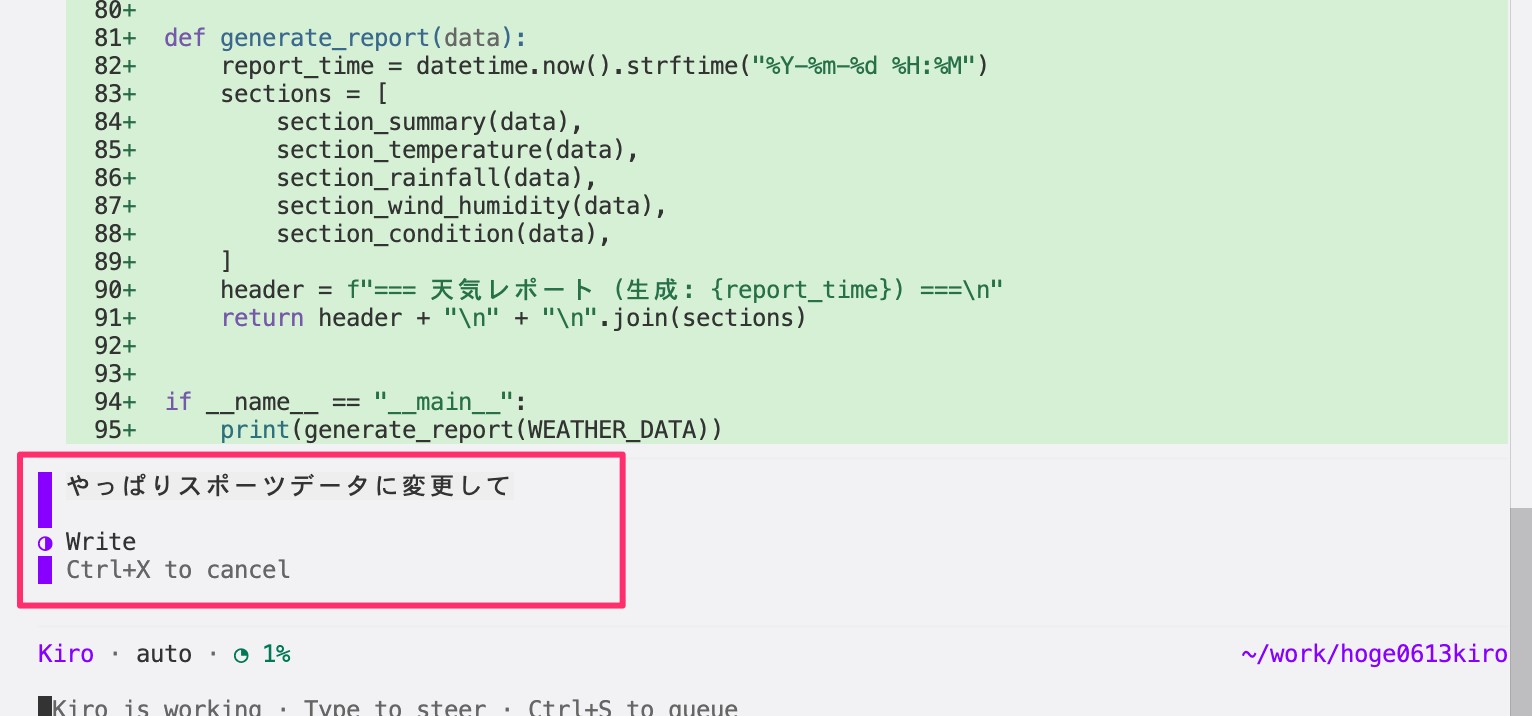
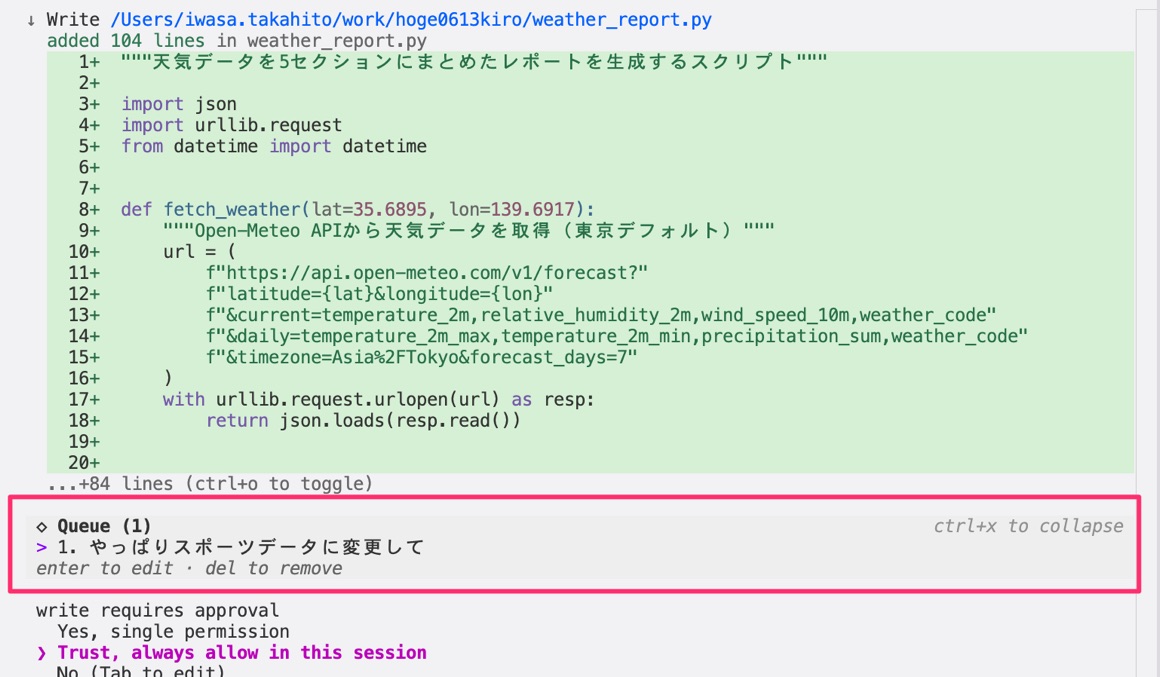
この状態でメッセージを入力すると、Steer · pending として表示されます。
エージェントが次のツール境界に到達すると、メッセージが注入されて方向修正が行われます。
Queue モード
続いて同じセッション内で Ctrl+S を押して Queue モードに切り替えてみます。
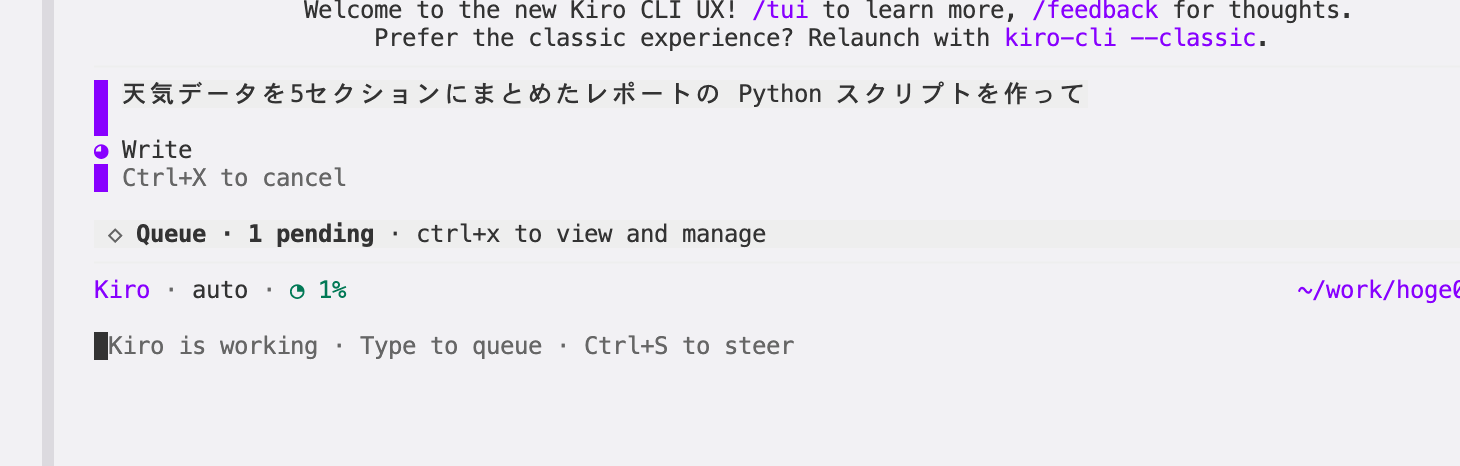
Queue モードでは、エージェント作業中にメッセージを送ると Queue · 1 pending としてローカルにバッファされます。
Steer モードとの違いは、即座に注入されるのではなく、現在のターンが終了してから次のプロンプトとして送信される点です。
Ctrl+X で activity tray を展開すると、キューに溜まっているメッセージの内容を確認・編集・削除できます。
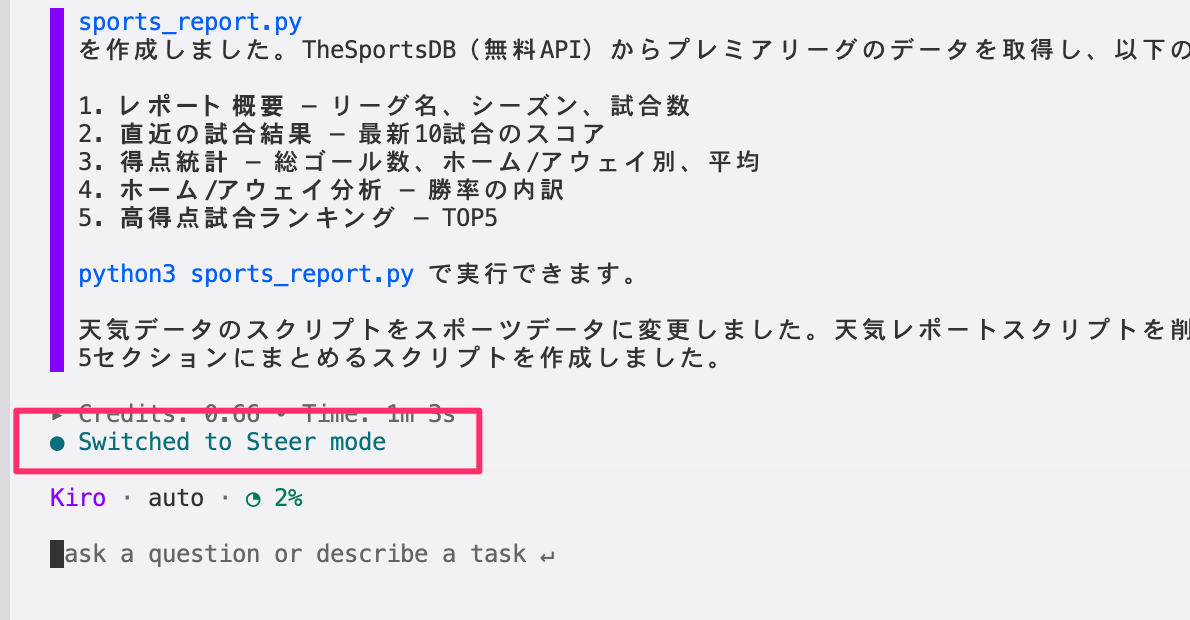
ターン終了後、キューのメッセージが自動的に送信されてエージェントが処理を続けます。
再び Ctrl+S を押すと Steer モードに戻ります。
/rewind の表示強化を確認してみる
/rewind コマンドは v2.4 で追加された、会話の任意のターンに戻って分岐できる機能です。
今回のアップデートでターンピッカーの表示が強化されました。
各ターンに、使用したツールや操作結果のサマリーが表示されるようになっています。
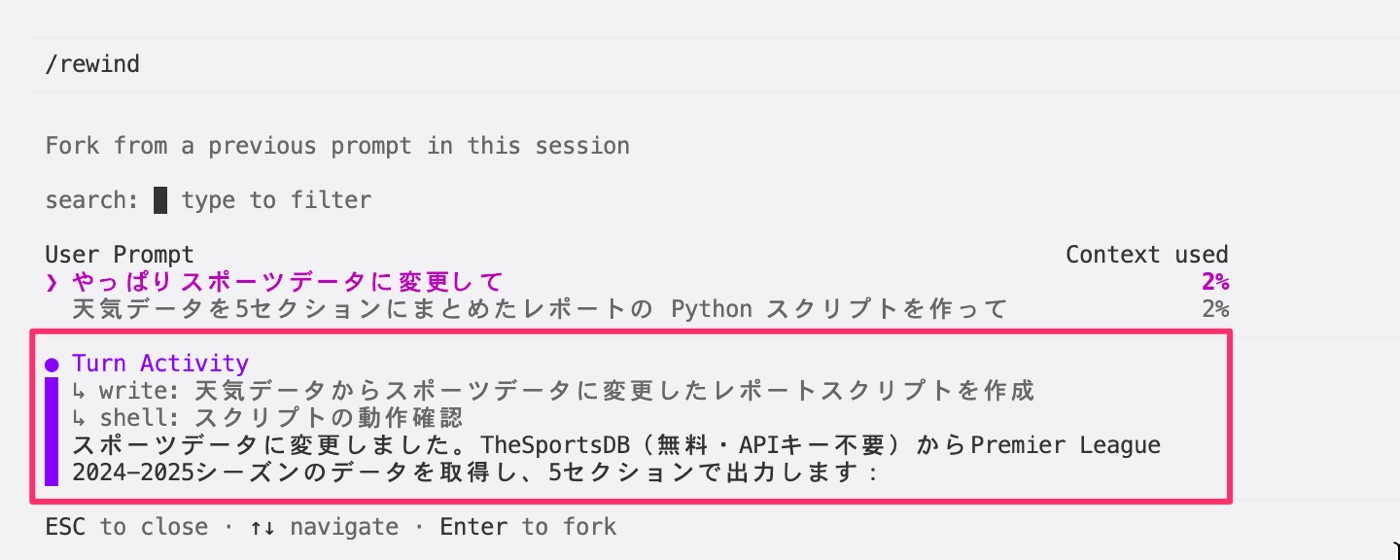
各ターンに「Turn Activity」が追加されており、どのツールを使って何をやったかが要約されています。
中身を展開しなくてもどんな作業だったかがわかるので、分岐点を探しやすくなりました。
Context used(コンテキスト使用率)も各ターンに表示されるので、どのあたりでコンテキストが膨らんだかも把握できますね。
さいごに
本日は Kiro CLI 2.7.0 に追加された /goal コマンド、Queue Steering、/rewind の表示強化を確認してみました。
Queue Steering は今まであまり意識したことのない概念でした。
これまでは割り込みたいときに Ctrl+C で中断して最初からやり直していたので、作業中にそのまま方向修正を送れるのは便利そうです。
/goal は正直まだ使いどころを掴みきれていません。
アナウンスによると、リファクタリングやバグ修正のようにテストで完了を判定できるタスクに向いているとのこと。
Useful for multi-step tasks where you want autonomous execution with a built-in quality gate.
今回の検証ではシンプルなタスクだと1イテレーションで終わってしまいましたが、もう少し複雑なタスクで検証ループが回る場面を試してみたいところです。
/rewind の表示強化はシンプルに良いですね。
以前はプロンプトのテキストしか表示されなくて、どのターンに戻ればいいのか情報が足りていなかったので、サマリーが付いたのはありがたいです。









