ロボット開発はじめます
2026.03.26
はじめまして。3/16にjoinしたatsuです。
私は、元々自動車の組み込みソフトウェア開発をしていました。
ロボット開発としては初心者ですが、物を動かすことには慣れている方だと思います。
なぜクラスメソッドでロボット開発?
クラスメソッドといえば、クラウドの会社というイメージをお持ちの方が多いのではないでしょうか。
そんなクラスメソッドがなぜロボットを使って開発をするのか?
答えはシンプルで、「ロボットよくわからないけど、まずはやってみよう」の精神でプロジェクトが始まりました。
そんなこんなでロボットが購入され、そのロボットを動かすために私がjoinしました。
わからないことも多いですが、手を動かしながら進めていきます。
ロボット活用のユースケースの選定
クラスメソッドの製造ビジネステクノロジー部には工場を持つお客様が多くいらっしゃいます。そこで最初のユースケースとして「工場やフロアの巡回パトロール」を選びました。
やることはシンプルです。夜間のフロアを指定したルートで自律巡回し、チェックポイントでカメラ撮影を行い、巡回が終わったら元の場所に戻ってくる。まずはここから始めます。
ロボット紹介
日比谷オフィスには3台のロボットがいます。
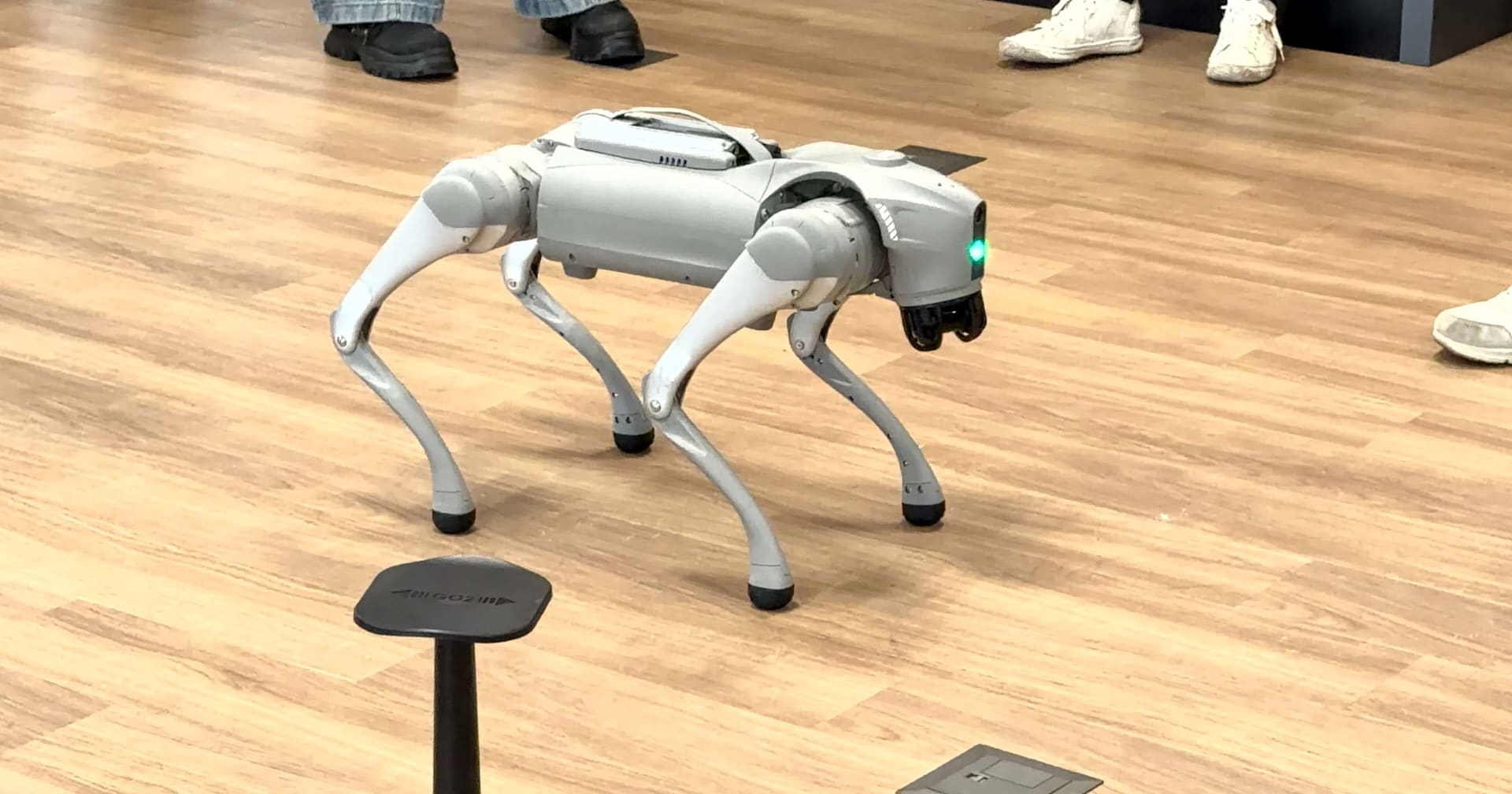
Unitree Go2(犬型)
Unitree G1(人型)
LOVOT(みんなの癒し)
今回の巡回パトロールには、犬型ロボットのUnitree Go2を使います。
ロボット未経験者にとって人型はサイズや挙動の面で扱うハードルが高いです。
まずは安定性の高い犬型から開発を始めます。
最後に
これからロボットの開発状況をブログで共有していきます。つまずいたポイントも正直に書いていく予定です。
ロボットに興味がある方は、ぜひ見ていただければと思います。
次回は犬型ロボットのGo2のセットアップ編です。お楽しみに。