【Agile Robotsブース訪問】ヒューマノイドの最前線を見てきた #HM26
概要
こんにちは、クラスメソッド製造ビジネステクノロジー部の田中聖也です。
HANNOVER MESSE 2026で、Agile Robotsのブースを訪問してきました!
ヒューマノイドロボットだけでなく、ロボットアームを含めたあらゆるロボット系を一社でまとめて展開していて、産業用オートメーションへの本気度を感じるブースでした!!
- Agile Robotsとは
- 産業用ヒューマノイド「Agile ONE」のデモ
- ロボットアーム「Thor 12」の展示
- デモを見て感じたロボット業界の進化スピード
- ロボット選定で意識したいベンダーロックの話
Agile Robotsとは
Agile Robotsはドイツ・ミュンヘンに本社を置くロボティクス企業で、ドイツ航空宇宙センター(DLR)からのスピンオフとして2018年に設立されました。
ヒューマノイドロボット・協働ロボット・ロボットアーム・自律走行搬送ロボット(AMR)など、産業オートメーションに関わるロボットをハードウェアからソフトウェアまでフルスタックで提供しているのが特徴です。
スタッフの方の話では、Agile Robotsのユニークセリングポイント(USP)は 「ハードウェア・エレクトロニクス・ソフトウェア・ソリューションを全部ワンストップで提供できる」 ところで、顧客は窓口が一つで済むという点を強調されていました。
ロボットの導入時って、メーカー・SIer・ソフトベンダーが分かれて契約も管理も煩雑になりがちなので、ここを一社で受けられるのは確かに大きいですね。
産業用ヒューマノイド「Agile ONE」のデモ
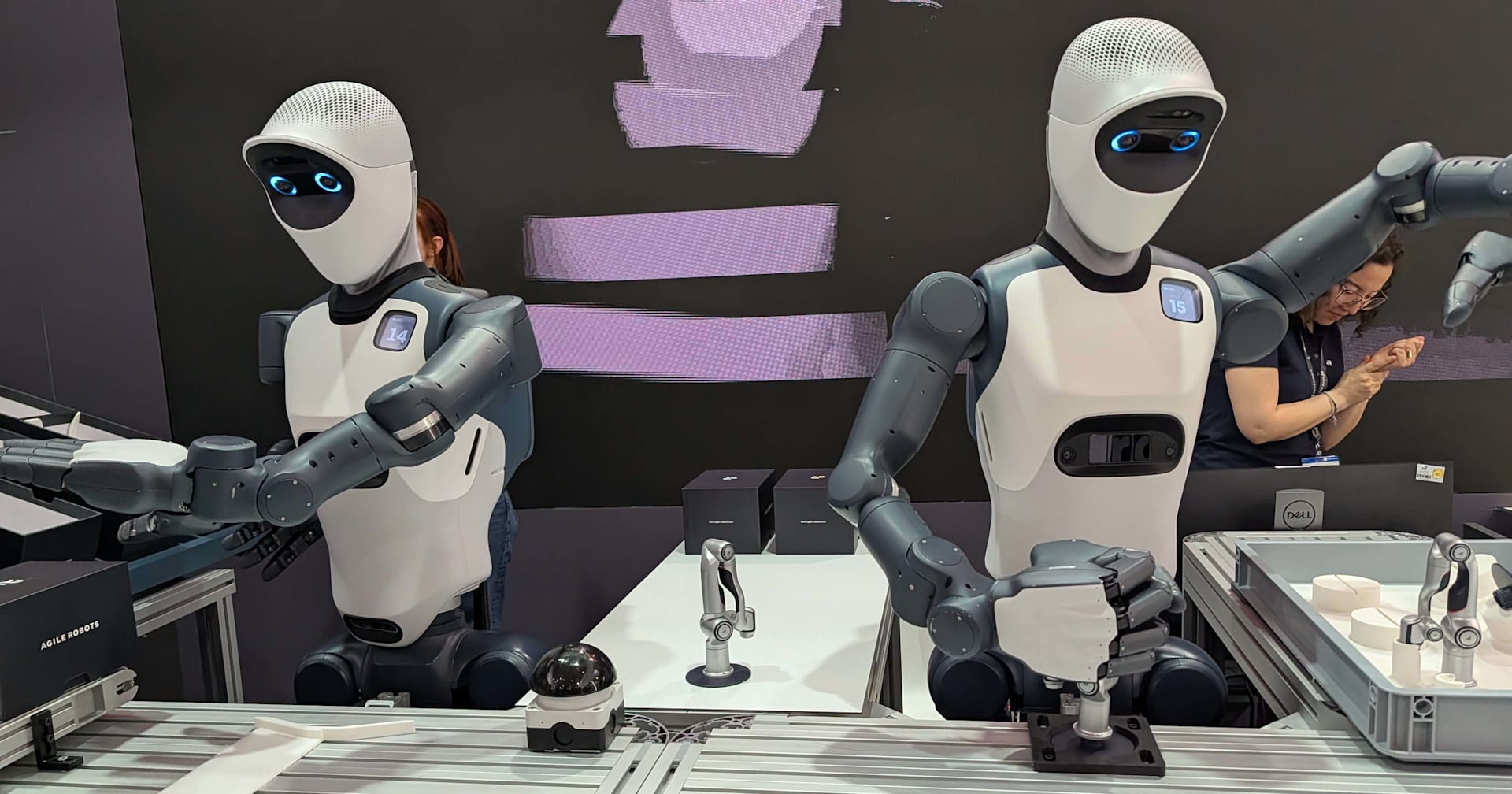
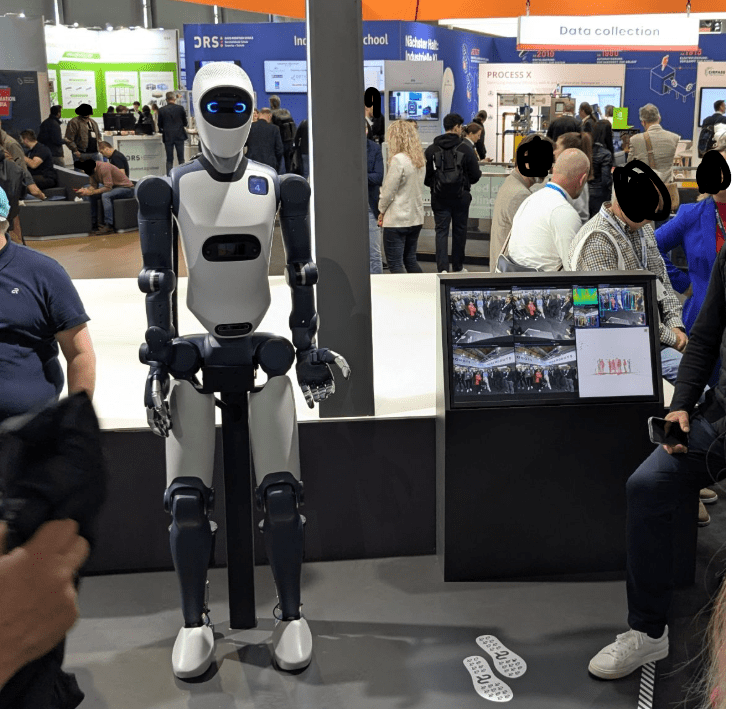
ブースの目玉は、産業用ヒューマノイドロボット「Agile ONE」です。
スペックは以下の通り。
| 項目 | 仕様 |
|---|---|
| 全身の自由度 | 71自由度 |
| ハンドの自由度 | 21自由度(片手) |
| 重量 | 約69kg |
| 可搬重量(ペイロード) | 20kg |
| センサー | 2Dカメラ(目)、ToFカメラ(3D)、レーダー、その他カメラ多数 |
ToF(Time of Flight、光が往復する時間で距離を測る方式)カメラやレーダーを組み合わせることで、周囲の環境を立体的に把握しながら作業できるようになっています。
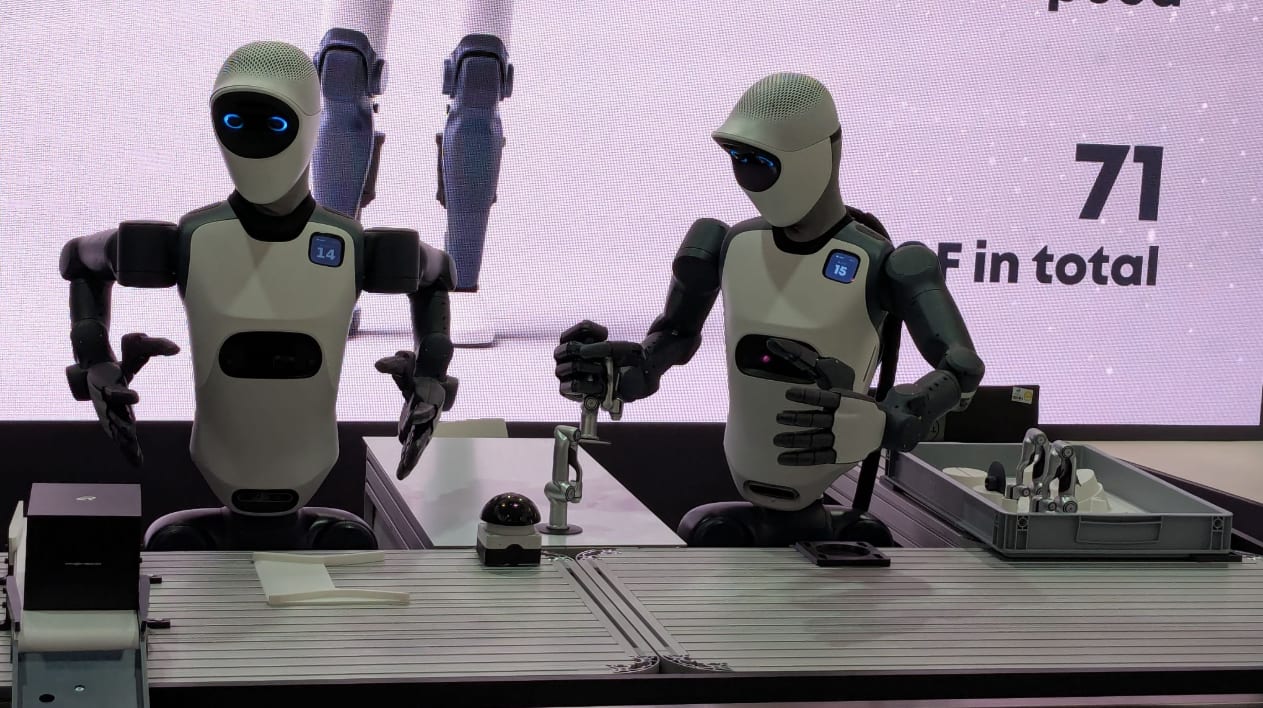
デモでは、Agile ONEが2台連携して小型ロボット「Diana」のミニチュアを組み立てる工程を見せていました。
1台目がベースプレートに本体を組み付けてハンドオーバーテーブル(受け渡し用の台)に置き、2台目がそれを取って梱包し、最後にパッケージとして送り出す、という流れです。

実際に見ていた時間帯は片方の機体で通信エラーが発生していてブートアップ中だったり、デモが途中で止まったりする場面もありました。
ただ、これは正直なところマイナス印象というよりは、 「ヒューマノイド2台がリアルタイムで連携して作業する」というレベル感が、もう普通に試せる段階に来ている という事実の方がインパクトが大きかったです。

私は2025年12月のAWS re:Invent 2025でも別のヒューマノイドロボットのデモを見たんですが、その時と比べてもハンドの細かい動きやロボット同士のハンドオーバー精度がかなり上がっていて、 数ヶ月単位で進化しているスピード感 を身をもって感じました!!

スタッフの方によると、ハンド部分も新旧の世代があり、新しい世代の方が自由度が増えていて、より細かいパーツも掴めるようになっているとのこと。
1mm径の極小ネジを掴んで穴に入れるような用途も、ヒューマノイド本体ではなく既存のロボットアーム製品では実績があるそうで、用途次第ではかなり繊細な作業まで対応できそうだなと感じました。
デモを見て感じたロボット業界の進化スピード
今回のブース訪問で一番感じたのは、 ロボット業界の進化スピードがちょっと尋常じゃない ということです。
re:Invent 2025から数ヶ月しか経っていないのに、ヒューマノイド同士の連携やハンドの細かさが目に見えて進化していて、毎回見るたびに「またできることが増えてる」状態。
これはおそらく、ロボット側のハードウェアの進化だけではなくて、Vision-Language-Action(VLA)モデルや基盤モデル(Foundation Models)といったAI側の進化が、そのままロボットの動作精度や柔軟性に反映されているからなんだろうなと感じました。
スタッフの方も、 「ハンドの位置検出やネジの穴の特定にはAIアルゴリズムを統合できる。基盤モデルやVLAを使ってロボットがネジの行き先を学習することも可能」 と話していて、AI×ロボティクスがもう完全に分離不可能なフェーズに入っているのを実感しました。
また、着実に新型ロボットの開発も進んでいるようです。
ロボット選定で意識したいベンダーロックの話
最後に、ティーチング情報の互換性について質問した時のやり取りが個人的には一番興味深かったです。
「他社ロボットのティーチング資産を、御社のロボットに移行できるか?」と聞いたところ、
- キネマティクス(関節構成)が違うので一対一の移行は難しい
- Cartesian空間(座標ベース)で書かれた動作なら可能性はある
- 関節ベース(Joint based)で書かれているとほぼ作り直し
- AIモデルは原則そのロボット用に再学習が必要
- Agile Robotsのエコシステム内であれば、自社製ロボット間でアプリケーションを共有できることを目指している
という回答でした。
ここで思ったのが、 ロボットを作る会社は、当然自社のエコシステムを広げたい思惑がある ということ。
ハードウェア・ソフトウェア・AIモデルを一気通貫で提供できる強みは、裏を返すとそのまま 「他社ロボットへの移行コストが高い」 という構造でもあります。
なので導入する側としては、
- 様々なロボットメーカーの情報を積極的に仕入れる
- 自社の用途・現場に合うロボットを選定する
- 一社の囲い込みにならないように、設計時点でロックインを意識する
といった姿勢が必要だなと感じました。
ロボットメーカーが提供する「ワンストップ」の便利さは確かに魅力的ですが、それをそのまま受け入れるのか、ある程度マルチベンダー前提で組むのかは、導入企業側で意識的に判断していきたいところですね。
まとめ
Agile Robotsのブースでは、ヒューマノイド・ロボットアームなどのロボット系を一気通貫で見ることができました!
進化のスピードがすごい一方で、選定する側はベンダーロックを意識して情報収集していく必要があると改めて感じた、印象に残るブース訪問でした!