フィジカルAIから盤レス制御・磁気浮上搬送まで〜ベッコフのブースツアーで見たPCベース制御の広がり〜 #HM26
「ロボットも、制御盤も、搬送システムも。ベッコフのブースに並んでいたものは、すべてつながっている」
ハノーバーメッセ2026で、ベッコフオートメーション(Beckhoff Automation)のブースガイドツアーに参加してきました。今回ブースは、約1,500平米と会場でも最大級の広さ。案内してくれたのはベッコフオートメーション株式会社(日本法人)代表取締役社長の川野俊充さんで、一つひとつ丁寧に解説していただく贅沢なツアーとなりました。
フィジカルAIからソフトウェアディファインド、盤レスの制御システム、磁気浮上式の搬送システムまで、とにかく守備範囲が広い。本記事では、まず会社の位置づけを整理したうえで、ツアーで見てきた内容を順番に紹介していきます。
ベッコフオートメーションとは
ベッコフオートメーションは、ドイツの精密機器メーカーです。基本的な公開情報を整理しておきます。
- 公式サイト: https://www.beckhoff.com/
- 本社: ドイツ・フェアル(Verl)
- 設立: 1980年(創業オーナーはHans Beckhoff氏)
- 従業員数: 約5,450名(2026年2月時点)
- 拠点: 41の子会社・支店、75カ国以上にパートナー網
- グローバル売上高: 12億4,000万ユーロ(2025年度、前年比+6%)
- 日本法人: 2011年から営業、約40名体制
顧客は産業ロボット・工作機械・射出成形機といった機械メーカーが中心で、製薬・自動車・半導体、さらにはエンターテインメントのアトラクションまで幅広い分野で使われているそうです。
製品は大きく4つのカテゴリに分かれます。
- 産業用PC(IPC) — 制御の心臓部となるインダストリアルPC
- TwinCAT — IPCにインストールしてリアルタイムコントローラー化する制御ソフトウェア
- モーション — モーター・ドライバー・アクチュエーターなどの駆動系
- I/O — センサーなどをつなぐ入出力コンポーネント
そして同社のコア技術が2つあります。1つは制御ソフトウェアの TwinCAT です。「Twin CAT」は双子の猫ではなく、「The Windows Control and Automation Technology」の略——つまりWindows上で動く制御・自動化技術であることに由来する、と川野さんが念押ししていたのが印象的でした。
もう1つが産業用ネットワークの EtherCAT (Ethernet for Control Automation Technology)です。ベッコフが2003年に発表したリアルタイムEthernetでIEC 61158として国際標準化されており、現在はEtherCAT Technology Group(ETG)が管理するオープン技術として公開されています。三菱電機・オムロン・キーエンス・パナソニック・安川電機など、国内の主要メーカーの製品も数多く対応しているとのことでした。
ここから、ツアーの流れに沿って展示を見ていきます。
フィジカルAI — モジュール式ロボットATRO × TwinCAT CoAgent
ブース中央のデモステージに置かれていたのが、今回の目玉となる展示です。「どこに行ってもフィジカルAIと聞く時代なので、我々もご多分に漏れずフィジカルAIをやっています」と川野さん。ベッコフとしてもこのデモを今回の目玉に据えていました。
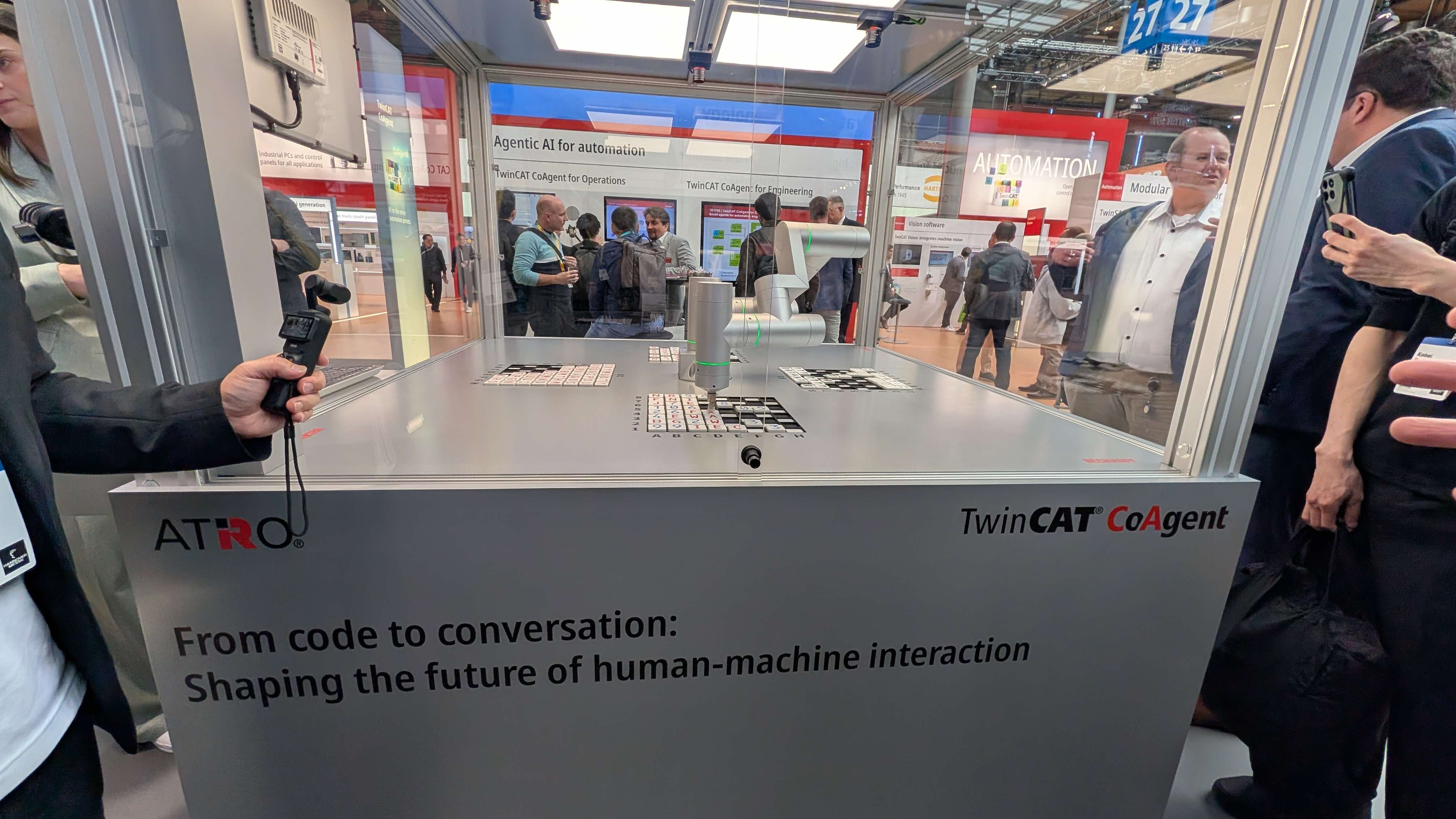
ロボットアームの名前は ATRO (Automation Technology for Robotics)。最大の特徴はモジュール性で、長さの違うリンクモジュールとモーターモジュールを自由に組み合わせ、アプリケーションに合わせて必要な軸数・リーチのロボットを構成できます。6軸ロボットにも、リーチを伸ばした構成にも、関節を減らして可搬重量を上げた構成にも、双腕にもできる。公式情報(ATRO製品ページ)では可搬重量は最大10kg、リーチは最大1.3m、最大16本のアーム構成まで可能とされています。
さらに、電源・データ・圧縮空気といったメディアをすべてロボットの体内に配線・配管しているため、外部に余計なケーブルがなく、各軸が無限回転できます。一般的なロボットのように可動領域の制約で「最短経路を戻る」必要がなく、回転しながら作業を続けられるわけです。
このATROをTwinCAT・EtherCATで制御し、そこにローカルLLMを組み合わせたのが今回のフィジカルAIの建て付けです。AIソリューションの名前は TwinCAT CoAgent 。なぜ「Co(コ)」エージェントかというと、想定するユーザーが「開発(エンジニアリング)」と「現場運用(オペレーション)」の2つに分かれており、その両方を支援する位置づけだからです。それぞれ TwinCAT CoAgent for Engineering(TE1700) と TwinCAT CoAgent for Operations(TF1700) として製品化されています。
デモでは、マイクに自分の名前を話すと、ローカルLLMが音声認識し、上部の4台のカメラでチェス盤の駒の色と種類・位置を画像認識して、名前のアルファベットを駒で並べてくれます。駒を「どこからどこへ動かすか」というプランニング部分は生成AIが担い、実際に掴んで置く動作は従来の制御コマンドが担う、という切り分けでした。将来的にはアームの各軸の角度生成やダイナミクスそのものをAIが解く、VLA(Vision-Language-Action)の導入といった発展余地があるとのことです。
印象的だったのは、このチェスのプランニングを大規模なオープンLLM(30Bクラス)をローカルで動かして実現していた点です。同社の大型IPCに搭載したハイエンドGPU上で動作させており、トークン生成速度はクラウドより速い水準が出ているとのこと。「ローカルでもここまでできるのか」という驚きがありました。製造業ではセキュリティ・セーフティの観点からローカルLLMを自社で育てたいという気運が高まっており、ベッコフはクラウドのLLMもローカルのLLMも自由に選べる構成を提案している、という説明でした。
TwinCAT CoAgent for Engineering — 開発者を支援するエージェント
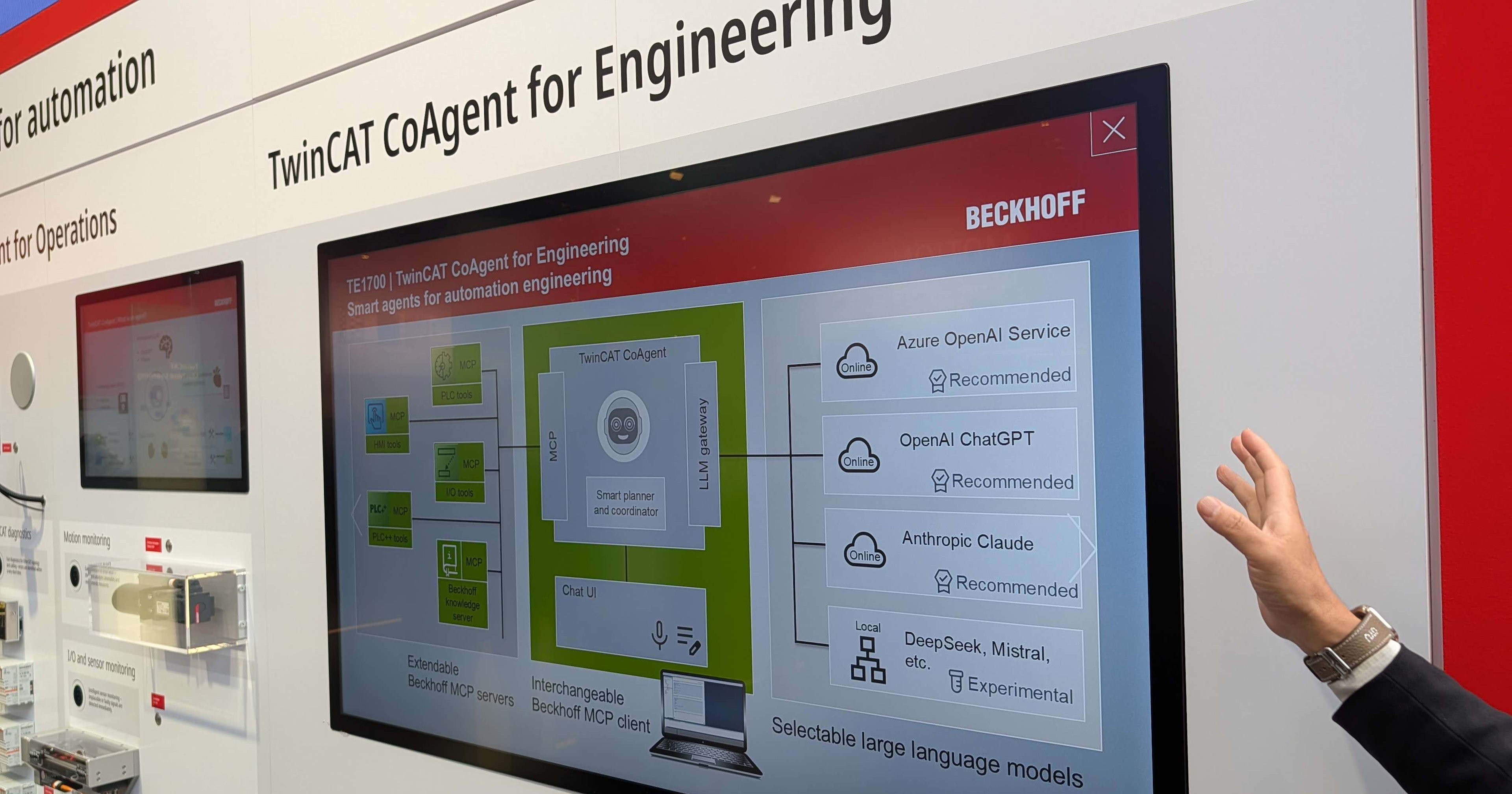
続いて、CoAgentのシステム構成図で「エンジニアリング向け」の中身を見せてもらいました。
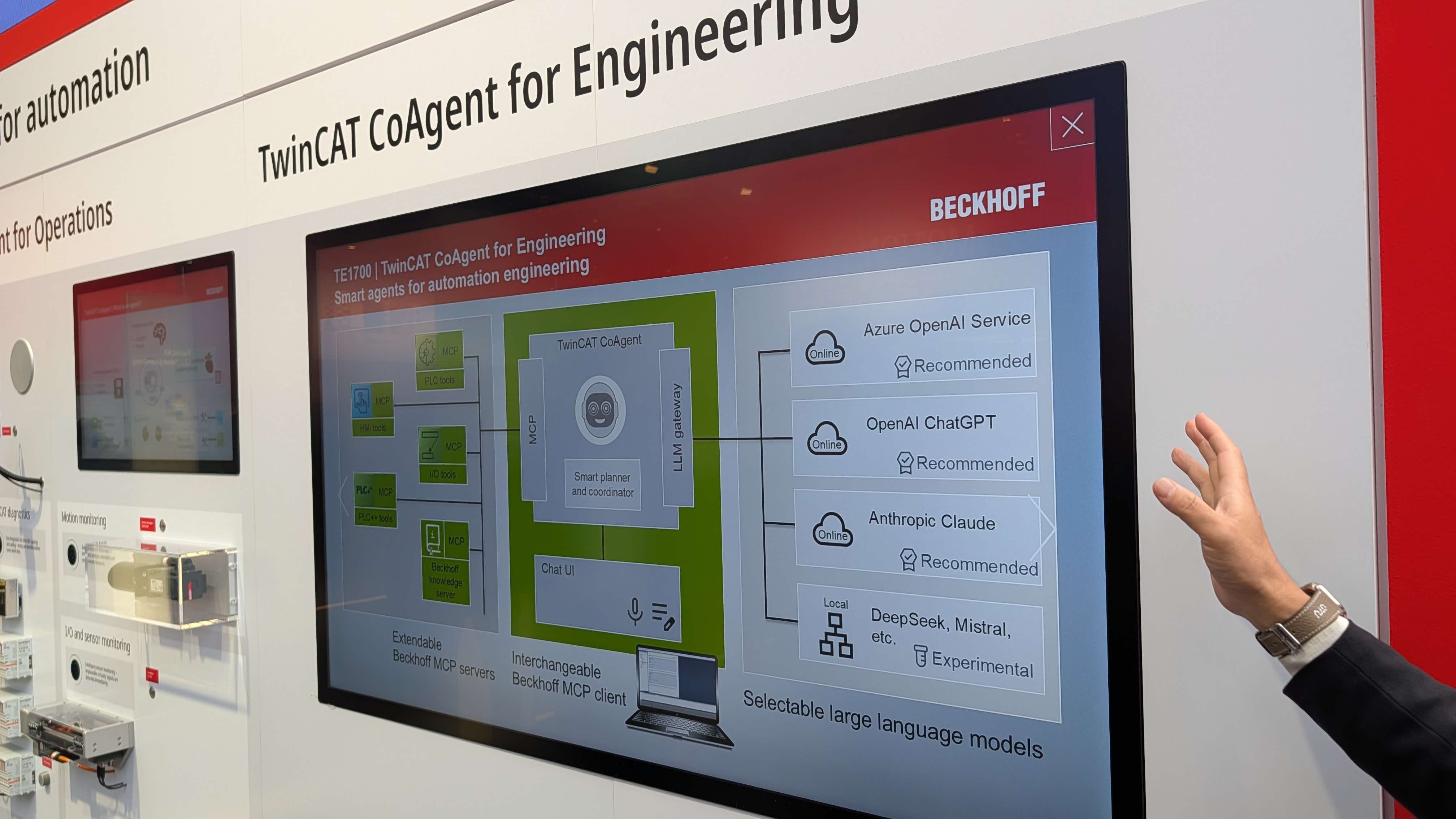
構成図では、緑色がベッコフ製品、グレーが他社製品や自作部分を表しています。全体は3つの要素から成ります。
- UI・エンジニアリング環境 — ユーザーとのインターフェース部分
- MCPサーバー — ベッコフ純正のMCP(Model Context Protocol)サーバーを順次製品化していく。例として、PLC関数のサンプルプログラムを生成するツール、足元のI/O構成を自動スキャンして設定するツール、メンテナンスマニュアルや不具合データベースを参照して「サービスマンに電話する前に原因と対処手順を教えてくれる」ナレッジサーバーなど
- 推論エンジン(LLM) — ここはベッコフのビジネス対象外。OpenAI・Azure・各種ローカルLLMなど、ユーザーが好きなものを選べる
ポイントは、 推論エンジンを特定ベンダーに固定せず、MCPに準拠していれば何でもつながる という設計思想です。顧客ごとに「うちはOpenAI」「Azureと契約がある」「Geminiしか使っていない」と事情はバラバラなので、「MCPさえ話せれば何でもできる」という構成にしているわけです。
さらに、当初は純正のMCPサーバーのみを想定していたところ、顧客からの「自分で開発したい」という要望を受け、MCPサーバーをユーザー側で拡張できる仕様(エクステンダブル)にしたとのこと。普段使っているVS CodeでMCPサーバーを自作してもいいし、オープンソースのベクトルデータベースを組み合わせてもいい。既存のTwinCATユーザーにとってのベストな構成を保ちつつ、選択肢を最大化するという、オープン志向のよく表れた構成だと感じました。
TwinCAT CoAgent for Operations — 現場のトラブルシュートを支援
次は「オペレーション向け」のCoAgentです。

紹介されたのは、ドイツの射出成形機メーカーで実装した事例です。「設定温度より高い温度でプラスチックが溶けないのはなぜか」と尋ねると、考えられる原因が複数列挙され、「これとこれを切り分けてください」とトラブルシュートの手順を返してくれます。
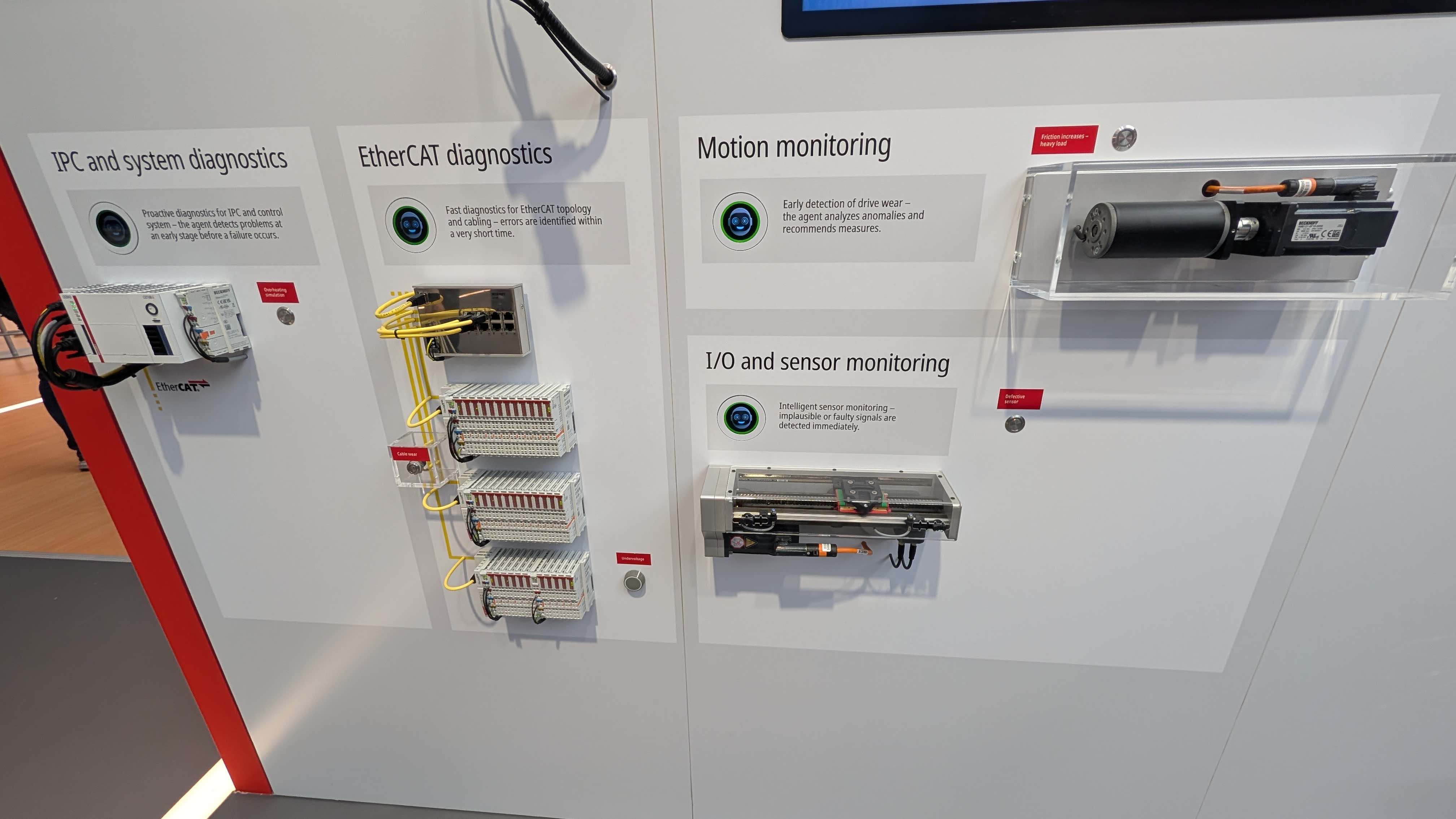
ブースには実際に動くデモ機もありました。オーバーヒート・ケーブル断線・電圧低下といったトラブルをボタンで意図的に発生させられるようになっており、後から「今のシステムのステータスを列挙して」と聞くと、ログをたどって「いつネットワークの断線があった」「オーバーヒートがあった」と教えてくれます。
ここで川野さんがAIに日本語で質問したところ「日本語に対応していません」と英語で返されてしまい、「さっきは日本語で答えてくれたのに」というなんともリアルタイムデモならではの一幕も。このデモではClaudeのAPIを使っていたそうで、「人間と同じで、AIもなかなか指示に従ってくれないので、しつけが必要ですね」というコメントがありました。
なお、このときデモに読み込ませていたのはステータス取得のツールのみで、復旧操作までやらせるにはI/O設定変更やTwinCATの起動・停止ができるツールを別途持たせる必要がある、という補足もありました。CoAgentでは、コントローラーとTwinCATランタイムが一体になっているため、ランタイムがMCPのプロトコルで直接LLMとやり取りできる点が強みとのことです。
DevOps with TwinCAT — 制御システムにCI/CDを
参加者にITエンジニアが多いと分かると、川野さんはOTよりIT寄りの話に切り替えてくれました。
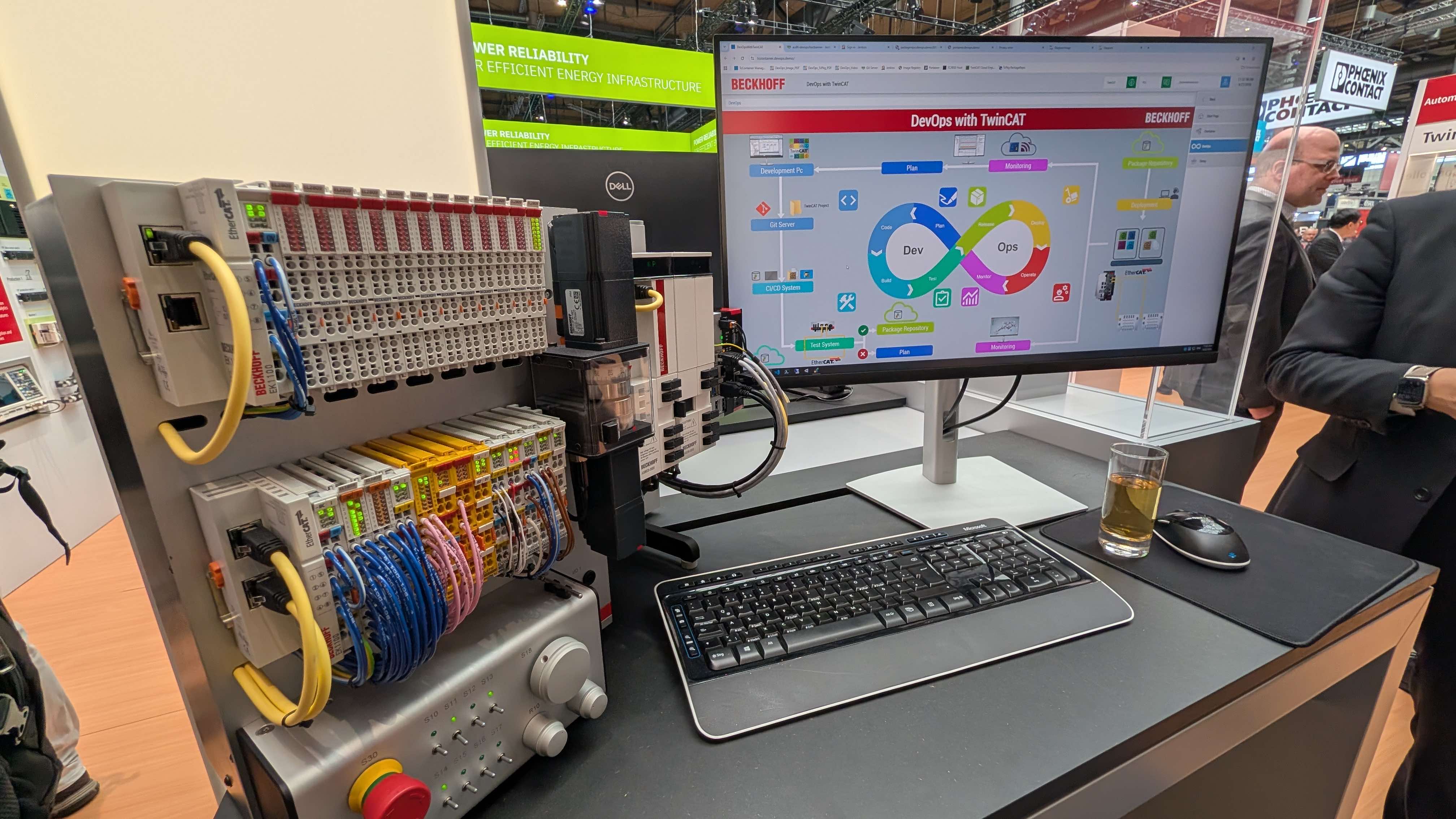
テーマはCI/CD。リポジトリから新しいバージョンをデプロイし、稼働中のシステムを監視、エラーやトラブルが起きたら改修計画を立て、テスト用PCで自動テストを通し、合格したものだけをパッケージリポジトリに反映してデプロイする——というIT業界では当たり前のサイクルを、PLCやモーションコントローラーといった制御の世界で回せる、というデモです。
ベッコフはもともとPCベースの制御なので、Linux・Windows・BSDといった一般的なIT資産の上で全ツールが動きます。この体制を顧客が受け入れさえすれば、いつでもDevOpsができるプラットフォームがある、と。「ソフトウェアディファインドと言いながらCI/CDができないなら意味があるのか。それを支える仕組みこそがソフトウェアディファインドだと考えているので、あえてその言葉は使っていない」という川野さんの言葉が印象的でした。Windowsでのシステム運用は過去30年やってきた、という自負も感じられました。
仮想PLC — コンテナ、ハイパーバイザー、リアルタイムLinux
その流れで、仮想化技術を使った仮想PLCの展示へ。

まずはコンテナを使った構成。1台のコントローラー上で、ロボット・プレス機・パッケージングマシンという3つの異なる機械を別々のコンテナで動かすデモです。
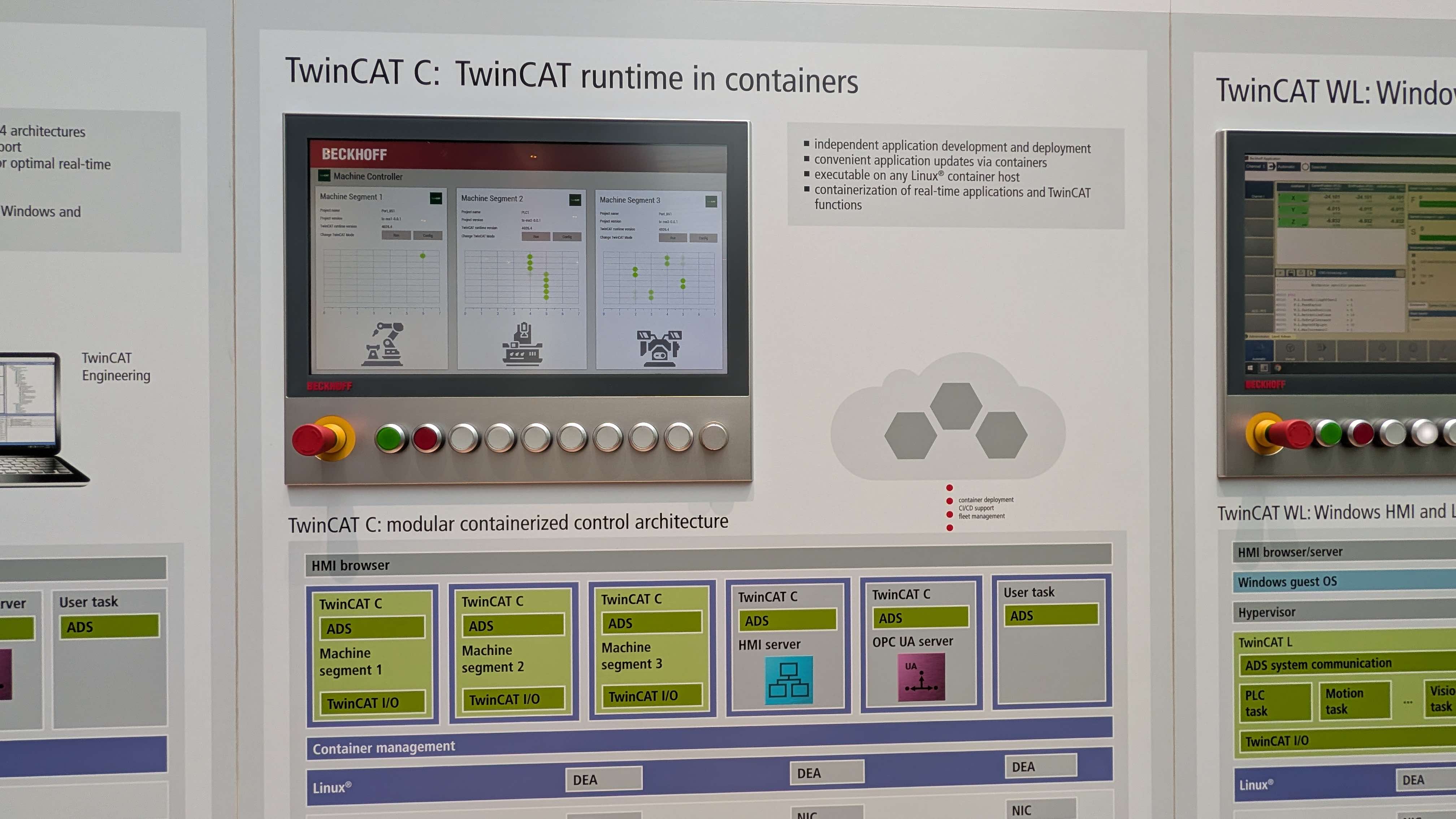
本来それぞれ別々のコントローラーが必要なところを、TwinCATのインスタンスを個別コンテナに入れて論理的に分離することで、ハードウェアを1台に集約できます。1つの機械に不具合が出ても、そのコンテナだけ落として再起動すれば他に影響しない。さらにCPU・GPU・RAMを動的に最適配置できるため、「全部で8GBしか同時には使わないのに、別々のハードだと8GBずつ必要になる」という無駄を避けられます。
この話が今まさに刺さるのは、RAMやSSDの価格高騰という文脈があるから。「同じ構成を買うと値段が上がってしまうが、少ないRAMでも動くアーキテクチャを採用すれば選択肢が増える」という提案を、実際に顧客へ行っているそうです。発想転換的な、PCベース制御ならではの解決策だと感じました。
ただしコンテナはカーネルを共有するため、セキュリティ面では万能ではありません。そこで、カーネルをきちんと分けたい場合や、LinuxではなくWindowsを載せたい場合にはハイパーバイザーを使います。
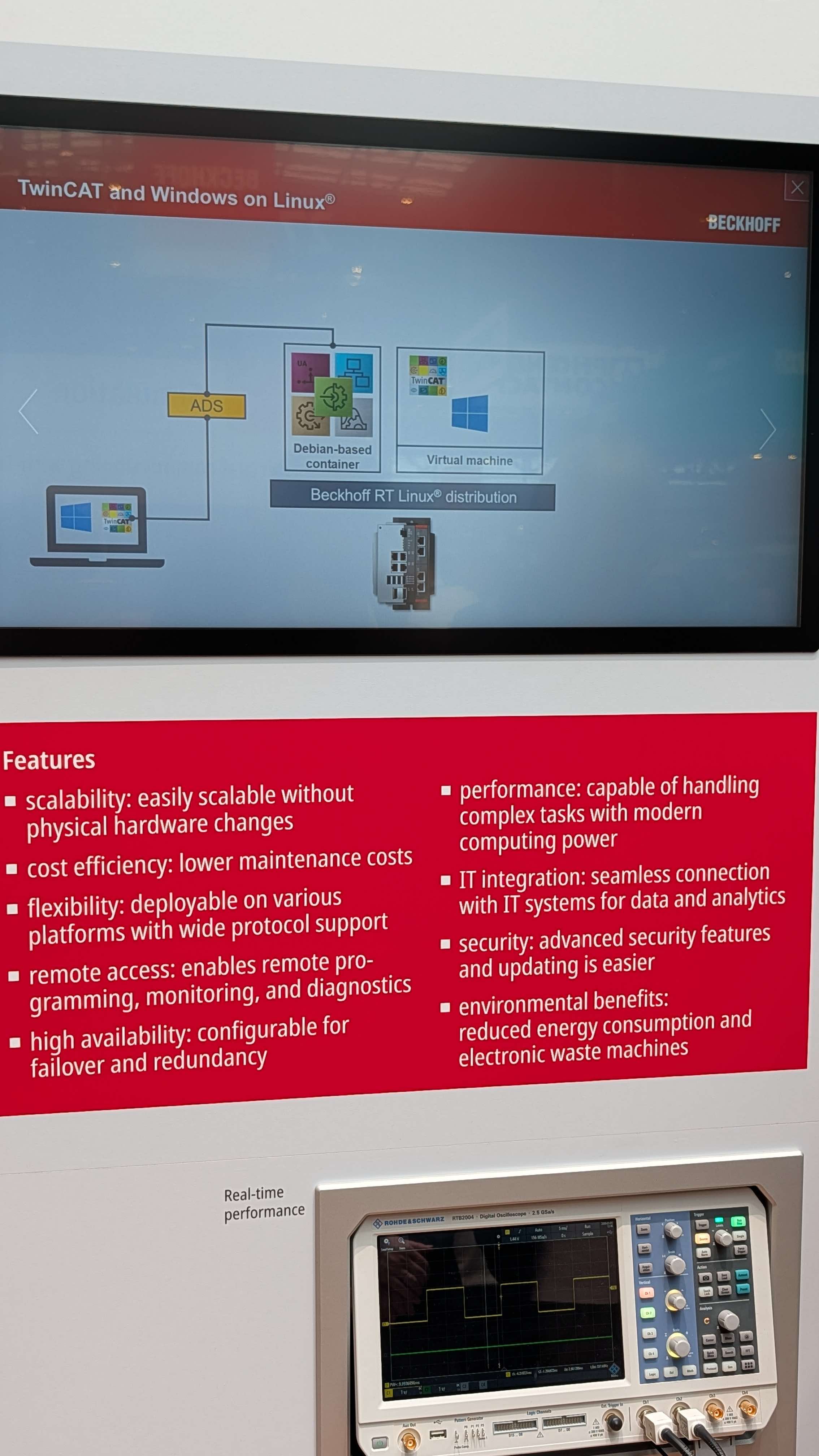
ハイパーバイザー構成では、GPUやEtherCATのネットワークポートをパススルーで割り当て、ハードウェア資産を物理的に分離します。下回りはLinuxで、KVMの仕組みを使って好きな構成の仮想マシンを作れる。顧客が自社で作り込んだWindowsアプリケーションや、BIツールのダッシュボードなどを、機械の上でそのまま動かせるのが利点です。コンテナでは動作要件(OSバージョン・RAM・CPU)の充足が難しいパッケージソフトも、要件を満たす仮想マシンとして定義できます。
そして一番下の土台が、ベッコフ専用のリアルタイムLinuxディストリビューションです。Debian 13ベースで、ソースコードはオープンにしつつ、メンテナンスとリアルタイム性の保証はベッコフがメーカーとして担う。CRA(Cyber Resilience Act)への対応という観点でも、供給責任を果たすために自社OSをきちんと持つ必要がある、という説明でした。
MX-System — 制御盤をなくす「盤レス」の発想
ソフトの話から一転、ハードの目玉であるMX-Systemへ。
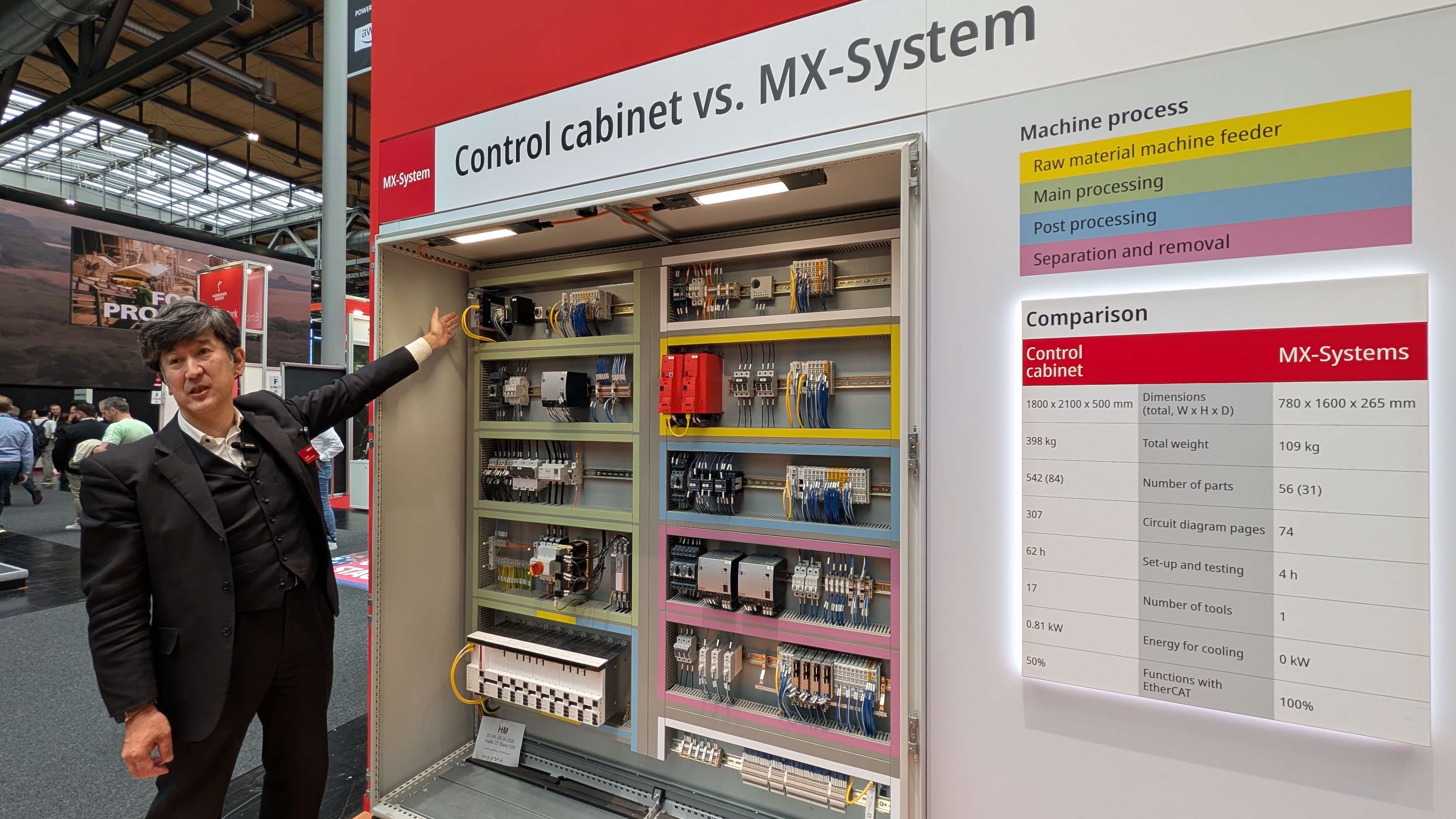
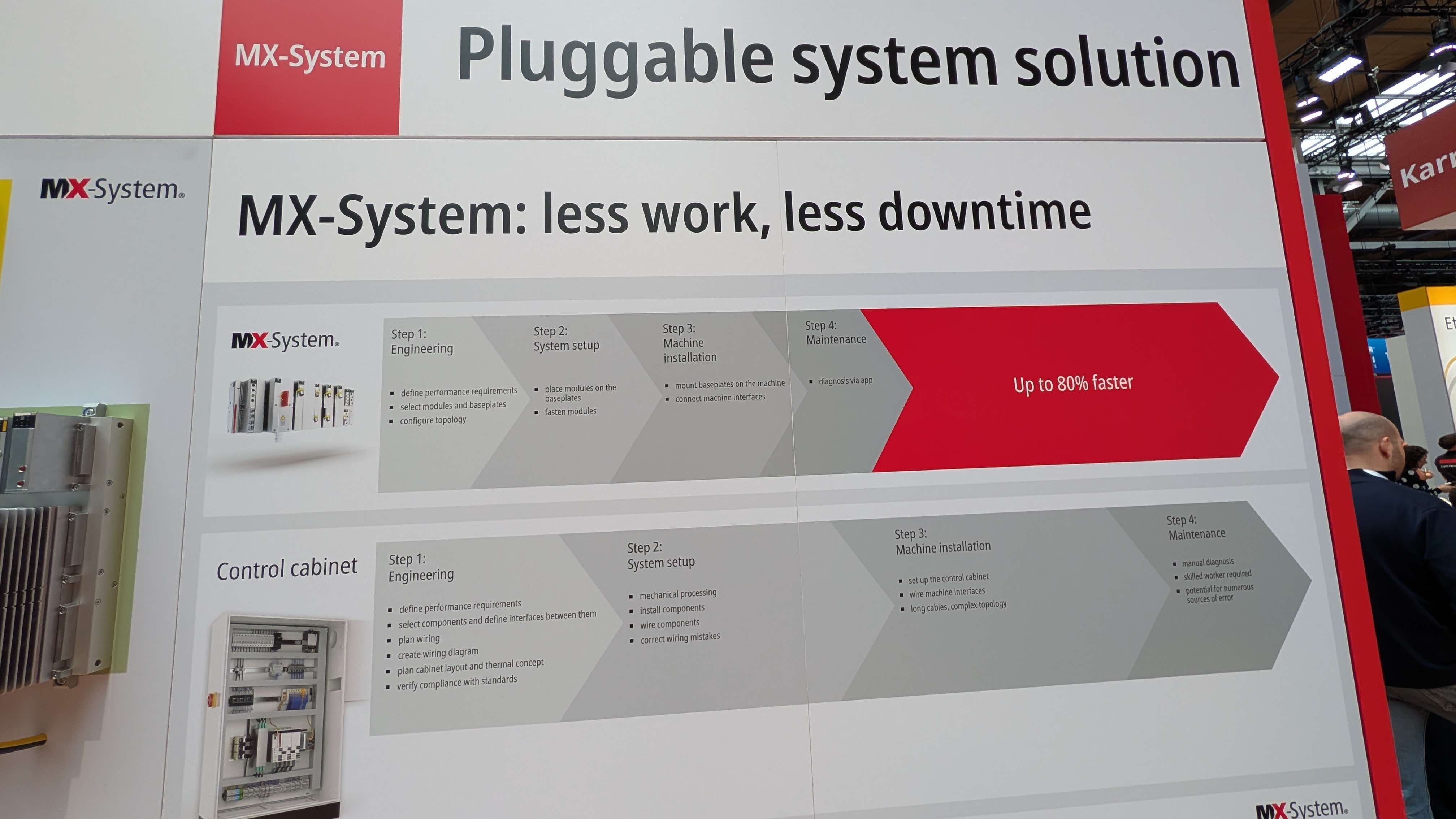
一般的な制御盤は、電源・ドライブ・I/O・IPCを組み合わせて作りますが、回路図は300ページにもなり、立ち上げに1週間ほどかかることもあります。実はベッコフのルーツは盤屋(制御盤を作る仕事)にあります。1980年、創業オーナーのHans Beckhoff氏が事業を引き継いだ際、配線工数の多さや配線ミスの大変さを痛感し、「いつか盤を作るというコンセプトそのものを変えたい」と考えたのが、この MX-System の原点だそうです。

MX-Systemは、ベースプレートに機能モジュール(電源・ドライブ・I/Oなど)をプラグして組み立てる、制御盤不要のシステムです。川野さんによると、従来の制御盤と比べてサイズは約1/4、パーツ数は約500から1/10、設計図は300ページから70ページ、立ち上げは1週間から4時間程度へと大幅に削減できるとのこと(公式資料では、立ち上げは同等の制御盤の24時間以上に対して1時間以内とされています)。冷却機構が不要なため省エネにもなります。

IP67対応で密閉されており、内部のファンとフィンで放熱するため、マシンベッドに直接取り付けたり、水洗いしたりもできます。すべての機器がEtherCATで通信し、24V/48V DCを同時に供給。各モジュールはネジ止めするだけで組み立てられ、電気工事の資格がなくても手順書に従えば作業できます。「あと5年もすると配線できる人がいなくなる」と言われる人手不足の現場や、ノウハウのある人材がいない海外拠点でも有効です。純正モジュールがない機器も、EtherCATポート経由で既存の盤につなげば相互互換性を保てます。
実際にベースプレートにIPCモジュールをインパクトドライバーでネジ止めする実演もあり(Atom 4コア・8GB RAM・80GB SSDでWindowsが動く産業用PCでした)、「私は不器用ですが、これくらいの作業ならできます」という川野さんの言葉どおり、組み立てのシンプルさが伝わってきました。配線できる人がいなくなる未来を見据えると、これは本当に普及してほしいソリューションだと感じます。
XPlanar — 磁気浮上式の搬送システムにもAI
続いては、磁気浮上式の搬送システム XPlanar です。

XPlanarは、コイルを敷き詰めた320mm角のタイルの上を、ハルバッハ配列の磁石を持つムーバー(プレート)が磁気浮上して動く仕組みです。2018年に発表され、おそらく業界でも最初のソリューション。X・Y・Z・回転・チルトの6自由度で動き、ムーバーは複数を連結して重い荷物も運べます(公式情報では1枚あたり0.4〜4.2kg、最高速度4m/s、加速度20m/s²)。摩擦も機械的摩耗もないため、半導体・食品・薬品・化粧品・自動車など幅広い分野で注目されているそうです。
面白いのは、この搬送システムにもAI(機械学習)が使われている点です。各プレートの自己位置・姿勢推定にはホールセンサーを使いますが、ホールセンサーは手軽で非接触な反面ノイズが多い。そこで、精密な外部軸でプレートを動かしながらホールセンサーの値をデータ化して学習し、そのモデルでノイズを補正して推論しています。
川野さんが「ここは覚えておいてほしい」と強調していたのが、 この推論をリアルタイムで回せるのはTwinCATだけだろう という点です。約5マイクロ秒というサイクルタイムでCPU上で自己位置推定を実行することで、位置決め精度5ミクロン、200mm/s時に10ミクロン以下の速度同期を実現しているとのこと。TwinCAT・EtherCATの高速リアルタイム制御という特徴が、見えにくいところで効いている展示でした。
新しいEtherCAT I/O — Bluetoothで現場診断
最後に、川野さんお気に入りという新しいI/O製品です。
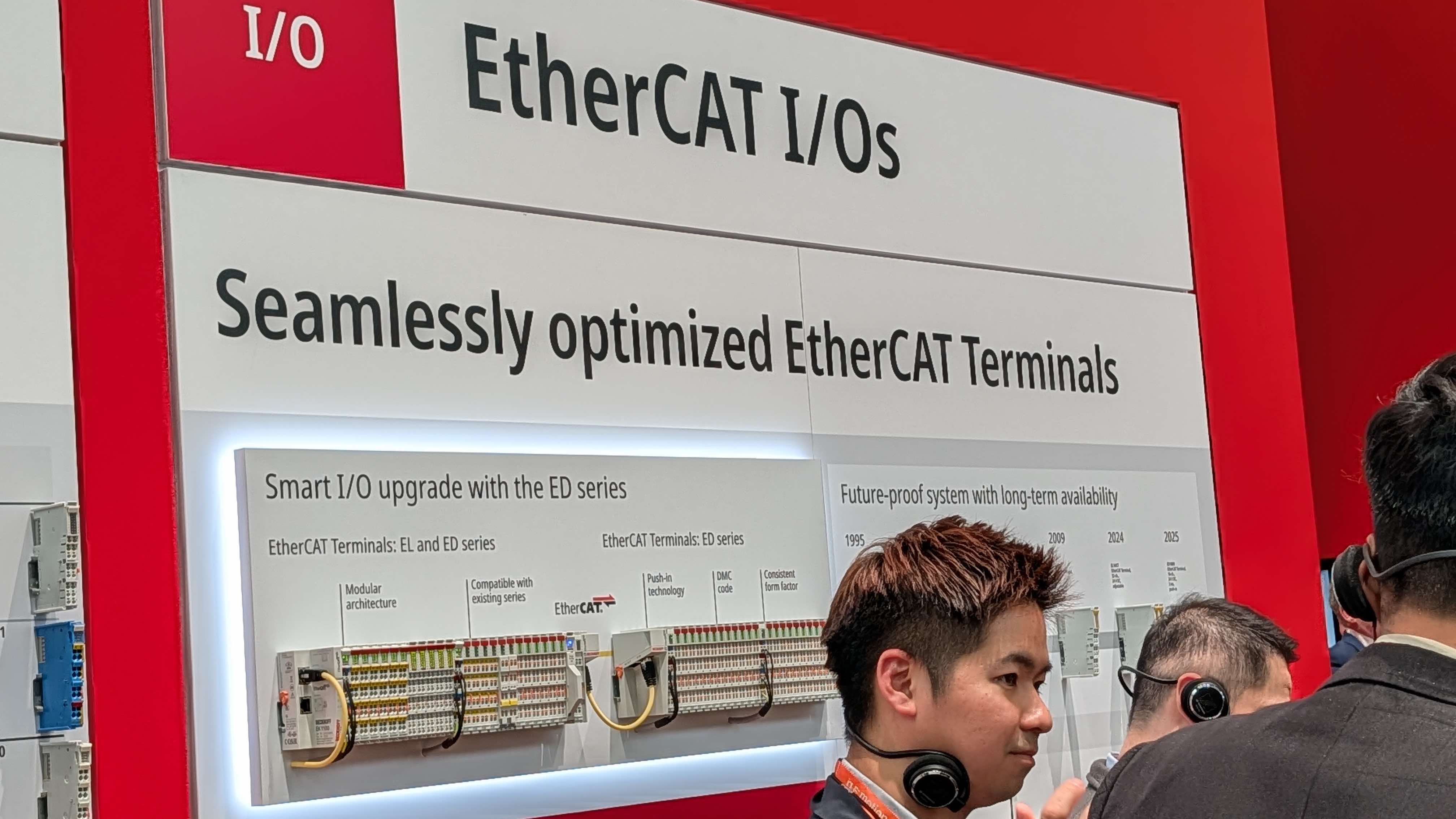
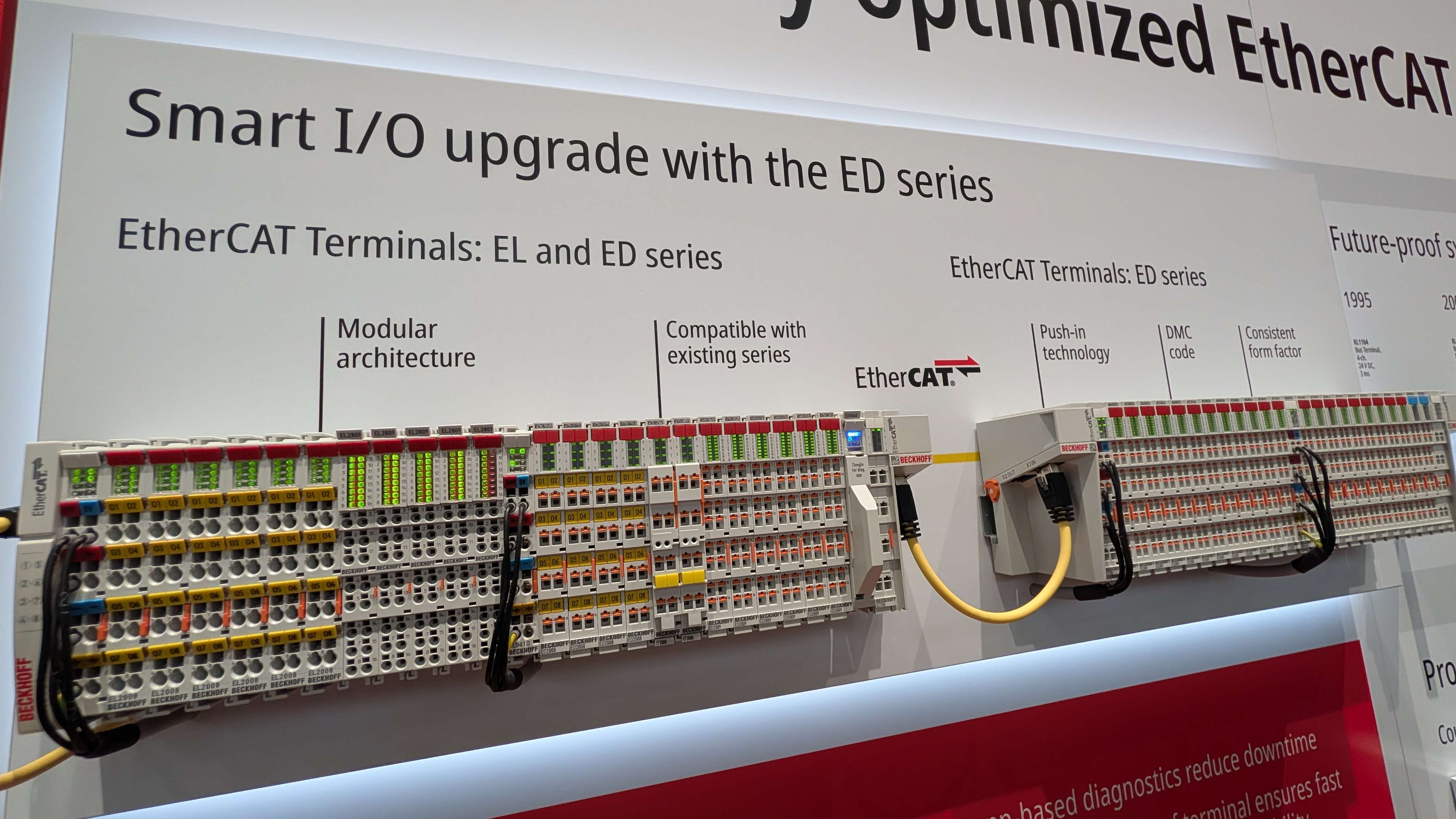
I/Oは「一番地味な製品」と言われがちですが、この新製品はBluetoothでスマホアプリと通信できます。アプリを開くと、稼働中のI/Oが一覧表示され、アナログ出力の波形をその場でモニタリングできる。1台のターミナルから、同じEtherCATネットワーク上の数百のターミナルの値をすべて取得できるのもポイントです。
現場で保全担当者がトラブルに遭遇したとき、従来は「ラップトップを持ってきて専用ツールを入れて……」となりがちですが、これがあればその場ですぐ診断できます。ローカルのBluetooth通信なので、インターネットにもWi-Fiにもつなぐ必要がなく、近づける人を制限すればセキュリティも担保できる。既存のI/Oターミナルの中にBluetoothモジュールを1つ追加するだけで実現できるそうです。閾値を設定して簡単なアラートを作る機能もあり、設備保全の現場で重宝しそうな、地味だが実用的な一品でした。
ブースツアーのまとめ
フィジカルAI、CoAgent、DevOps、仮想PLC、MX-System、XPlanar、Bluetooth I/Oと、振り返ると本当に守備範囲の広いツアーでした。それでも川野さんいわく「まだ半分くらいしか話せていない」とのことで、ブースの広さと展示の密度に驚きました。
通底していたのは、「PCベースの制御」という一貫したアーキテクチャと、「いかに手間と配線を減らすか」という徹底した効率化の思想です。盤レスのMX-System、省配線のモーター、Bluetoothでその場診断できるI/O——どれも現場の人手不足や手間に対する解決策として、よく練られていると感じました。生成AIやローカルLLMの活用も、その延長線上に自然に組み込まれていたのが印象的です。
製造業のDXに取り組むうえで、制御の足元を支えるこうしたプラットフォームの進化は見逃せません。丁寧に案内してくださった川野さんに感謝しつつ、来年はどんな展示が見られるのか楽しみにしたいと思います。
それでは今日はこのへんで。濱田孝治(ハマコー)でした。
参考資料
- ベッコフオートメーション 会社概要: https://www.beckhoff.com/en-en/company/
- ATRO(Automation Technology for Robotics): https://www.beckhoff.com/en-en/products/motion/atro-automation-technology-for-robotics/
- TwinCAT CoAgent for Engineering(TE1700): https://www.beckhoff.com/en-en/products/automation/twincat/texxxx-twincat-3-engineering/te1700.html
- TwinCAT CoAgent for Operations(TF1700): https://www.beckhoff.com/en-en/products/automation/twincat/tfxxxx-twincat-3-functions/tf1xxx-system/tf1700.html
- XPlanar(磁気浮上式搬送システム): https://www.beckhoff.com/en-en/products/motion/xplanar-planar-motor-system/
- MX-System(盤レスシステム): https://www.beckhoff.com/en-en/products/mx-system/
- EtherCAT Technology Group: https://www.ethercat.org/