ドローンが俯瞰しロボットが点検。SUPCONのプラント自律化への取り組み #HM26
危険な現場こそロボットに。SUPCONが見せる『自律するプラント』
ハノーバーメッセ2026で、中国の産業オートメーション大手SUPCON(スプコン)のブースを訪問してきました。プラント向けの「自律ロボットワークフォース(Autonomous Robot Workforce)」をテーマにしたブースセッションに参加できたので、その内容を現場の流れに沿って紹介していきます。

SUPCONとは
まず、ブースを案内してくれた会社の位置づけを整理しておきます。基本的な公開情報は以下のとおりです。
- 公式サイト: https://global.supcon.com/
- 本社: 中国・杭州
- 上場: 上場企業(688777.SH)
- 事業内容: DCS(分散制御システム)を中核とする産業オートメーションベンダー
- 主要対象産業: 石油・ガス、化学・石油化学、電力、パルプ・紙などのプロセス産業
- 導入実績: 世界39,000社以上
今回のブースのテーマは「From Automation to Autonomy(オートメーションから自律へ)」。データを集めて分析するだけでなく、リアルタイムに自律実行するところまで持っていく、というメッセージが一貫していました。
SUPCON Showcases the Path to Autonomous Operations at Hannover Messe 2026
ブースの土台にあるTier0 — UNSベースの産業データ基盤
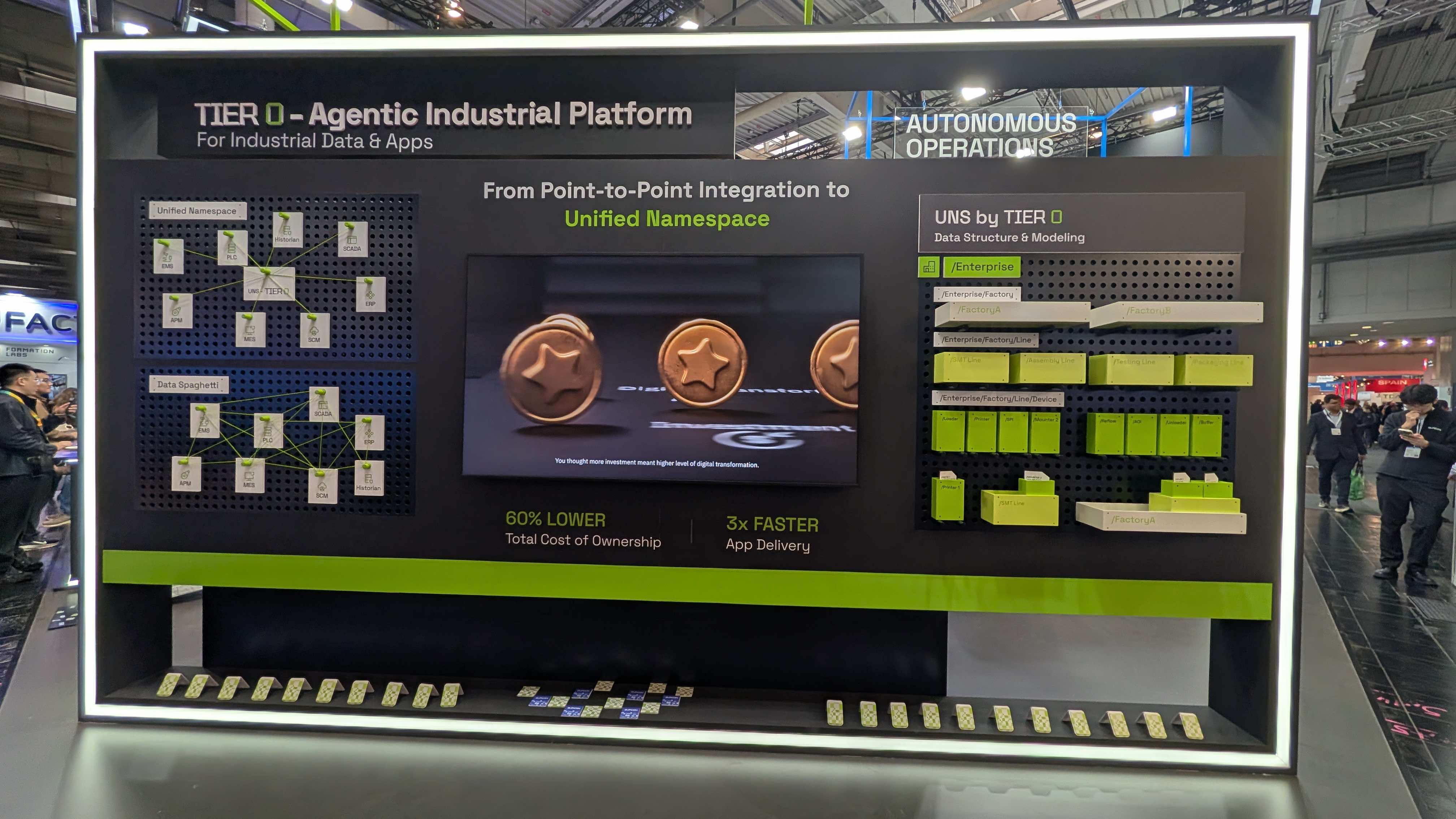
ブースで最初に目に入ったのが、SUPCONが基盤として打ち出している Tier0 という産業データプラットフォームです。Tier0はUNS(Unified Namespace)アーキテクチャの上に構築されたクラウドネイティブな基盤で、現場の多種多様なデータを統合し、コンテキストを付与してアプリケーション開発まで繋げる、という思想で作られています。

MQTTのpub/subを活用してベンダーロックインを避ける、という考え方は、いま製造現場のデータ基盤で標準になりつつあるUNSの王道パターンそのものでした。後で紹介するロボットの群れも、結局はこのデータ基盤の上で動く「現場を歩き回るセンサー」として位置づけられているのが、SUPCONの構成の特徴だと感じました。
ブースセッション:AI×ロボティクスで自律ワークフォースを作る
ここからがブースセッションの本編です。「なぜAI×ロボティクスが必要なのか」から始まり、「どう作るか(Sensing/Thinking/Actionの3層)」、そして「海外での導入事例」まで、自律ワークフォースの全体像を一気通貫で見せてもらえる構成でした。
なぜ産業AI×ロボティクスが必要なのか

説明員の方は冒頭で「みなさん、プラントの中でロボットがどう動くと思いますか?」という問いかけから入りました。

説明の核心はシンプルでした。プラントの操業は、現場のエンジニアの経験に深く依存している。どう操作するか、どう異常を察知するか、どう分析するか — これらが熟練者の暗黙知に支えられている。ところが、その現場というのは防爆対応が必要なハザードエリアだったり、人間が長時間いるには危険な環境だったりする。
だからこそ、 人間の代わりにロボットに現場を担わせたい 。これがSUPCONの出発点でした。単なる省人化ではなく、危険な作業から人を解放して、エンジニアをより付加価値の高い判断業務に振り向ける、という整理です。プレスリリースでも「技術は人間を置き換えるものではなく、エンジニアを解放するものだ」という言い方をしていて、ブースのトーンと一致していました。
産業AI×ロボティクス=自律ワークフォース
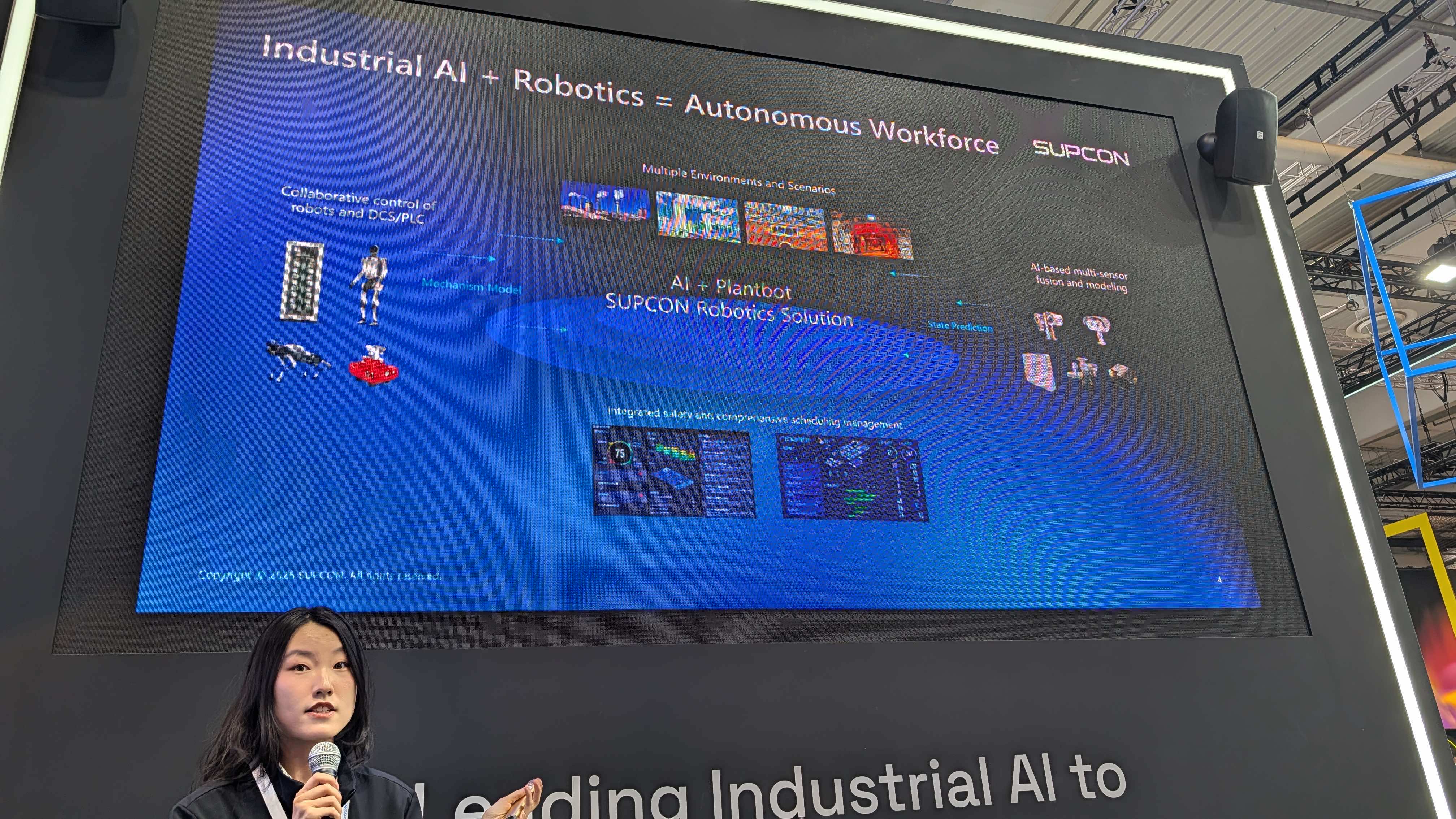
ではどうやって自律的なワークフォースを作るのか。スライドの左側に並んでいたのは、ヒューマノイド型、四足歩行型(犬型)、車輪型など、さまざまなタイプのロボットでした。
ポイントは、SUPCON自身がロボットを作るわけではない、という割り切りです。説明員いわく「ロボットそのものは気にしなくていい。重要なのは環境とシナリオだ」と。プラントの中をどう歩くか、屋内か屋外か、危険エリアかどうか、必要なペイロードはどれくらいか — シナリオごとに要件が変わるので、それに応じて最適なロボットの組み合わせとセンシングを テーラードで提供する 、という立て付けでした。
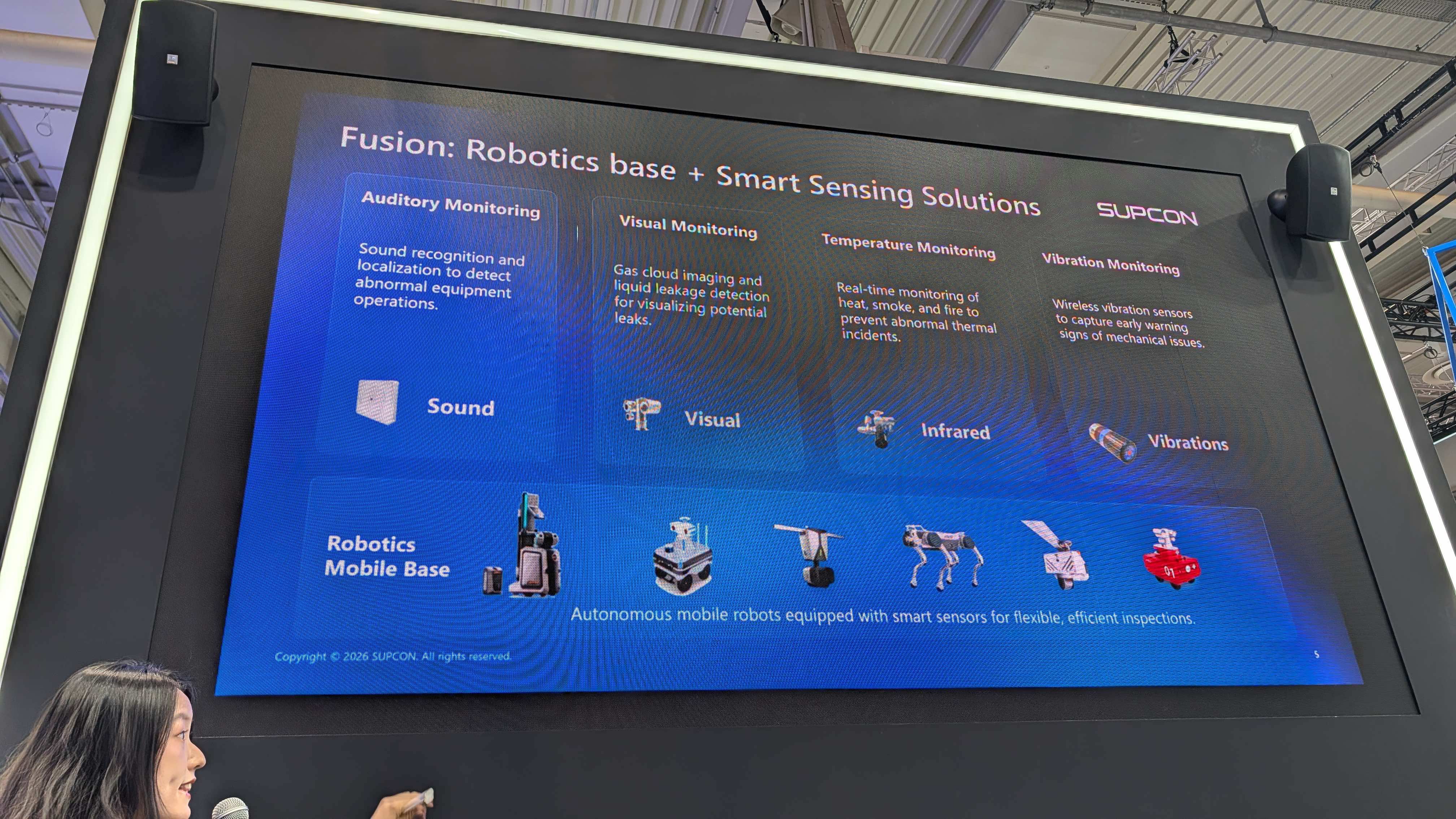
Fusion — ロボティクス基盤とスマートセンシングの融合
技術アーキテクチャは「Sensing(センシング)」「Thinking(思考)」「Action(実行)」の3層で整理されていました。
まずSensingの層。ロボットには、音響、ビジュアル(カメラ)、赤外線、温度、振動といった複数のセンサーが統合されています。人間でいう「目」や「耳」にあたる部分で、これらを組み合わせることで、ロボットが自然に移動しながら環境全体を把握できる、という説明でした。
そして、このハードウェアを束ねるのが統合制御・監視ソフトウェアです。これは既存の制御システムと連携させることもできるし、単独で使うこともできる、という柔軟な作りになっていました。
Thinking — マルチセンサーフュージョンとモデリング

次がThinkingの層。ここがSUPCONが最も力を入れているところだと感じました。
温度、圧力、音、振動といったデータを集めるだけなら、他社でもやっている。SUPCONが強調していたのは、その先です。集めたデータをAIで推論し、 「いつメンテナンスが必要か」「現場に行って詳細を確認すべきか」を判断する 。さらに、検知した状態が危険なのか、低リスクなのかまで分析して提示する。データを溜めるところで止めず、意思決定に繋げるアルゴリズムを持っている点を前面に出していました。
この時系列データの推論を支えているのが、SUPCONが独自に開発した産業向けの時系列基盤モデル「TPT(Time-series Pre-trained Transformer)」です。産業の時系列データ専用に作られたAIモデルだという説明でした。
Action — 複数システムをまたぐ相互運用
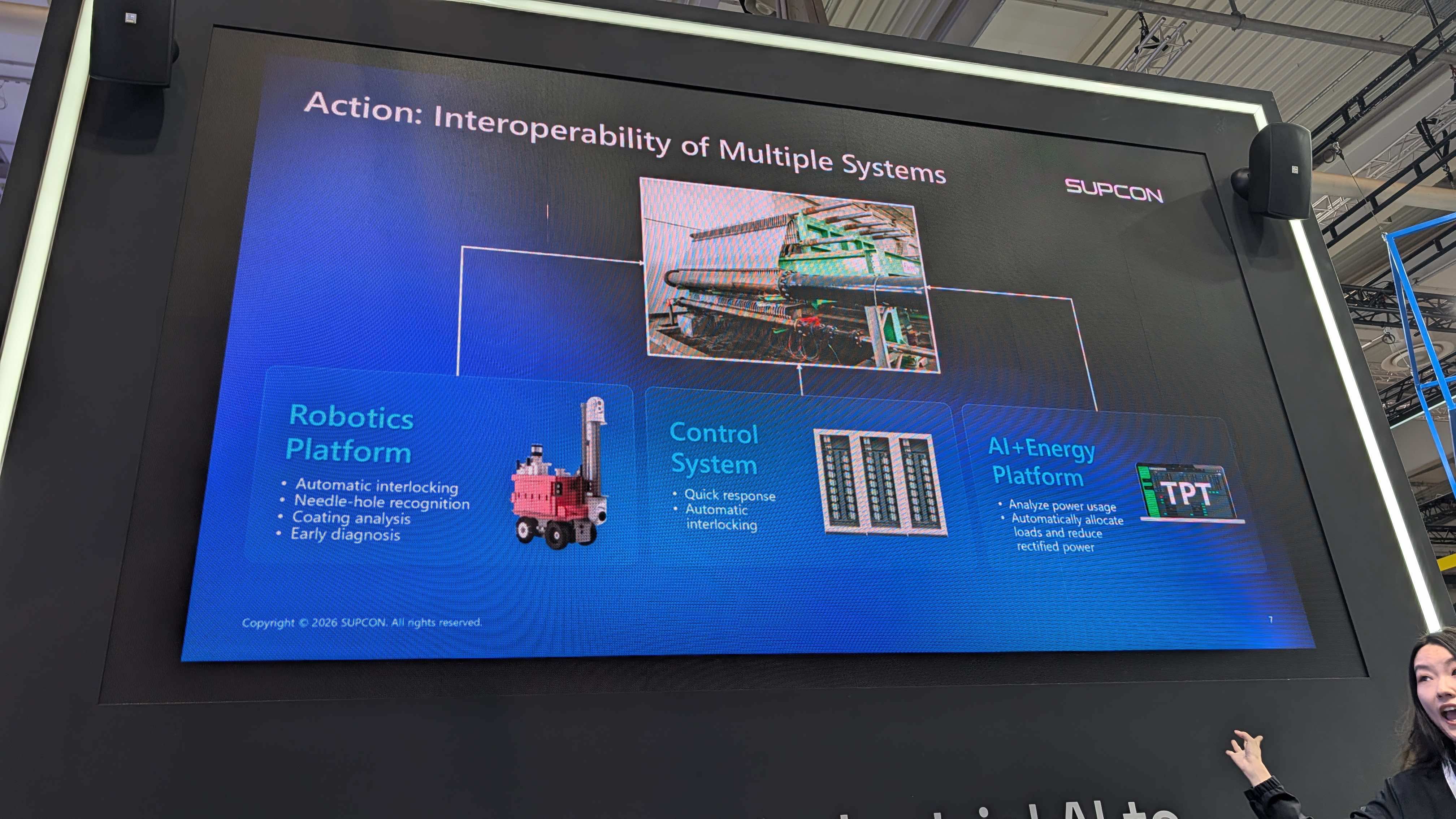
3層目がActionです。ここで言うアクションは、ロボット単体の動作にとどまりません。制御システムや上位レイヤーと連携して、プラント全体のプロセスに働きかけるところまでを指していました。
統合制御プラットフォームが、種類の異なるロボット群を束ねて指示を出す。ロボットが異常を検知したら、その情報を制御システムに送り、システム側で処理やアクションを実行する。さらに上位ではエネルギーマネジメントと連携して、省エネの提案やアクションまで繋げる、という構想でした。
Collaborations — ドローンとロボットの協調、クローズドループ制御

個人的に一番おもしろかったのが、異なるロボットを役割分担させる協調のシナリオです。
具体的にはこういう流れでした。まずドローンでプラント全体をマッピングする。その結果を「ハザードカラー」で可視化し、 赤は危険エリア、緑は安全、オレンジや黄色は要確認 といった具合に色分けする。この情報をプラットフォームに転送し、地上のロボット(車輪型などの巡回ロボット)が要確認エリアに向かって、本当にメンテナンスや修理が必要なのかを現地で検証する。
ドローンが俯瞰でアタリをつけて、地上ロボットが詳細を詰める、という役割分担です。空と地上の異なるロボットを1つの点検タスクに集約する、という見せ方が具体的でわかりやすかったです。
検知から制御までを閉じた「クローズドループ」で回す、という点もSUPCONらしいところでした。
Platform — 統合管理システム「Studio」
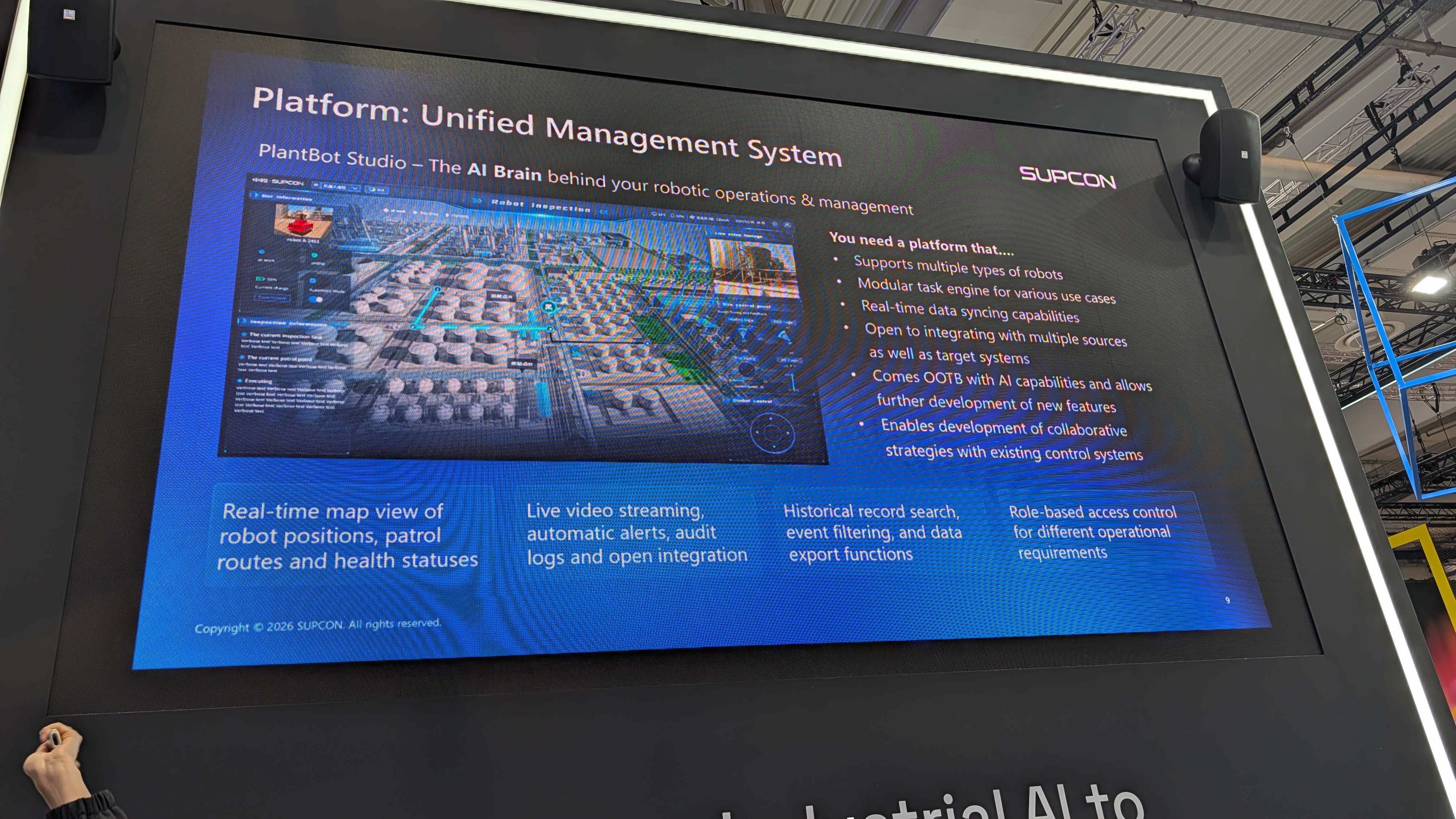
これらすべての情報を一元的に扱うのが、統合管理システムの「Studio」です。
画面上では、点検ポイント、各ロボットのステータス、タスクの状況(巡回中なのか、いつ戻るのか)、そして点検結果のレポートまでを管理できるようになっていました。カスタマイズにも対応しているとのことです。冒頭のTier0データ基盤と、現場のロボット群、そしてこのStudioが繋がって、一つの自律オペレーションのループになっている、という全体像がここでようやく腹落ちしました。
海外導入事例 — 韓国ISU Chemicalとサウジアラムコ
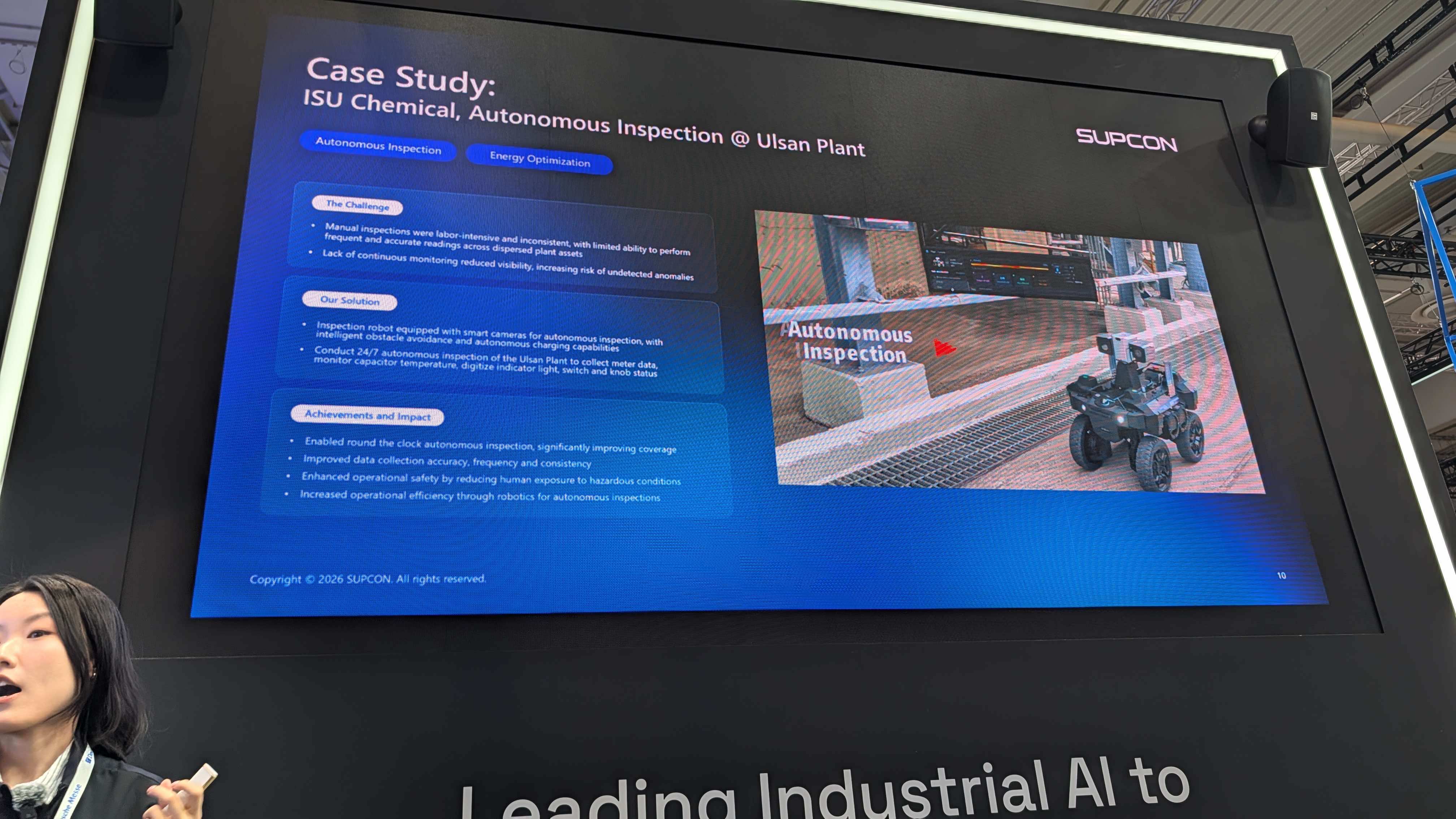
最後に、海外での導入事例を紹介してもらいました。
1つ目は韓国のISU Chemicalの化学プラントでの事例です。巡回ロボットが障害物を避けながら自律的に点検を行い、しかも自分で充電ステーションに戻って充電する、という完全自律のデジタルワークフォースが稼働していました。
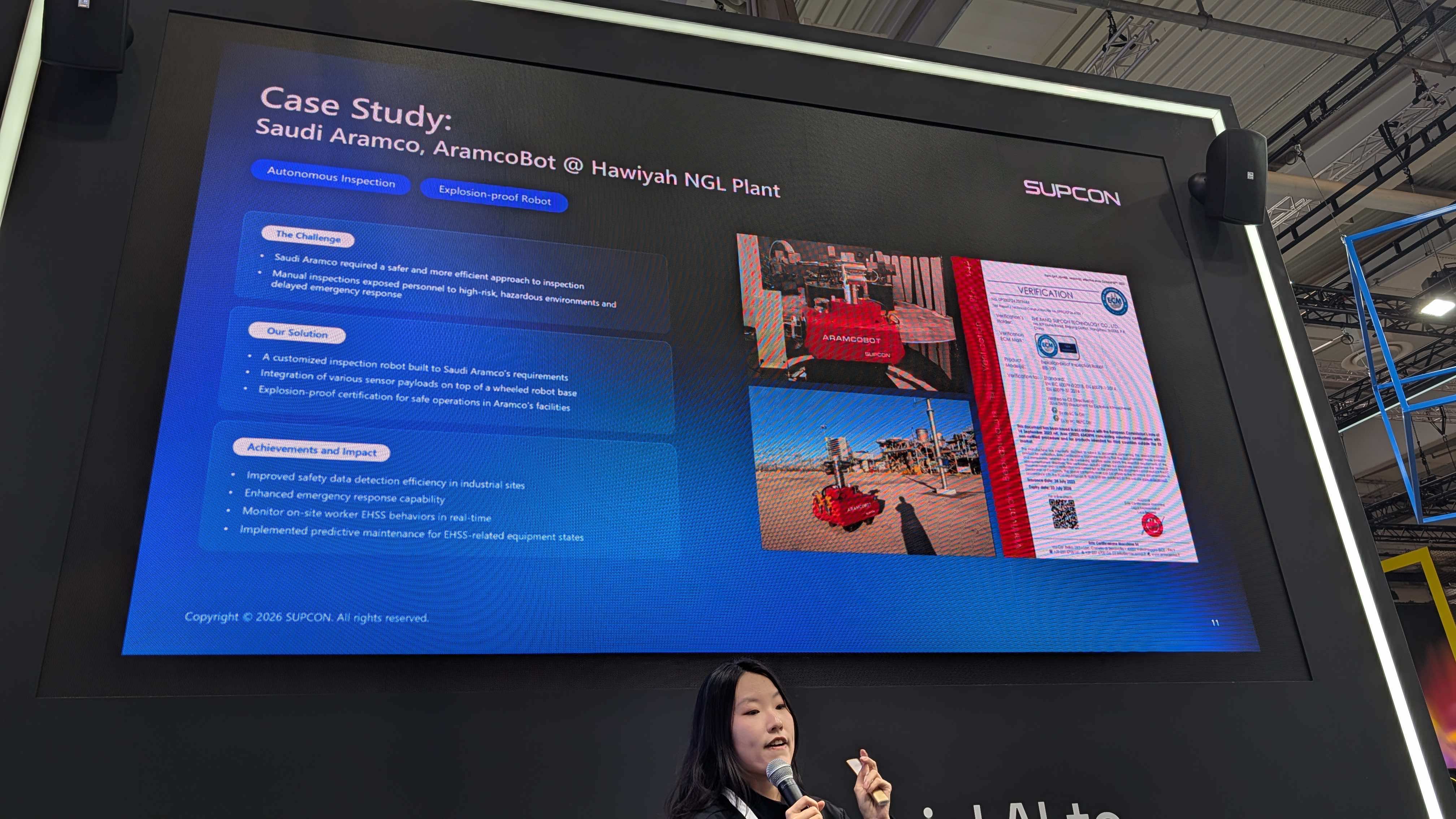
2つ目がサウジアラムコの「AramcoBot」です。2022年からコラボレーションを開始し、2023年に第1世代のロボットを点検チームと共同で導入。背景には「過酷な環境で人の安全を確保したい」という切実なニーズがあったそうです。サウジの化学プラントは高温でハザードの多い環境のため、エンジニアが立ち入るのは健康面でも望ましくない。そこをロボットに置き換えていった、と。そして今年、アップグレード版となる第7世代のロボットを納入したとのことでした。2022年から数えて第7世代というスピード感に、この領域での実装の蓄積を感じました。
まとめ

SUPCONのブースを通して一番印象に残ったのは、「ロボットを作る会社」ではなく「プラントを自律させる会社」として自分たちを位置づけている点でした。
ロボットそのものは外部のものを使い、自分たちはその上のセンシング・思考・実行の3層と、Tier0というデータ基盤、そしてStudioという統合管理に集中する。DCSベンダーとして長年プロセス産業の制御を担ってきたからこその、「現場のクローズドループをどう自律で回すか」という発想が一貫していました。
危険な現場をロボットに任せ、人はより高度な判断に集中する — このメッセージは、防爆エリアやハザード環境を抱える日本の製造業・プラント業界にとっても、決して他人事ではないテーマだと感じました。物理AI(フィジカルAI)の社会実装が一気に現実味を帯びてきているのを、改めて体感したブースでした。
それでは今日はこのへんで。濱田孝治(ハマコー)でした。
参考資料
SUPCON 公式
- SUPCON Global(グローバル公式サイト): https://global.supcon.com/
- 会社情報(About): https://global.supcon.com/about
- Tier0(UNSベースの産業データプラットフォーム): https://tier0.app/
- TPT(Time-series Pre-trained Transformer/産業時系列基盤モデル): https://global.supcon.com/digital/tpt
- Robotics(ロボティクス): https://global.supcon.com/robotics
- Universal Control System(UCS/ソフトウェア定義制御): https://global.supcon.com/control-systems/ucs
- Distributed Control System(DCS): https://global.supcon.com/control-systems/dcs
ニュースリリース
- SUPCON Showcases the Path to Autonomous Operations with Software-defined Controls, Large Industrial AI models and Agentic AI Platforms at Hannover Messe 2026(PR Newswire, 2026年5月): https://www.prnewswire.com/news-releases/supcon-showcases-the-path-to-autonomous-operations-with-software-defined-controls-large-industrial-ai-models-and-agentic-ai-platforms-at-hannover-messe-2026-302762122.html
- From Automation to Autonomy: SUPCON to showcase next-generation technologies empowering Autonomous Operating Plants at Hannover Messe 2026(PR Newswire, 2026年4月): https://www.prnewswire.com/news-releases/from-automation-to-autonomy-supcon-to-showcase-next-generation-technologies-empowering-autonomous-operating-plants-at-hannover-messe-2026-302740217.html